Клиренсом или дорожным просветом называют расстояние от опорной поверхности до нижней точки днища автомобиля или танка. Его величина является одним из основных параметров, определяющих проходимость машины: чем меньше клиренс, тем больше вероятность зацепить днищем за преодолеваемое препятствие, а то и вовсе «сесть на брюхо».
В 1957 г. в возглавляемом Ж.Я.Котиным КБ Ленинградского Кировского завода был разработан уникальный тяжелый танк, получивший обозначение «Объект 279». Ведущим конструктором проекта был Л.С.Троянов. Для этой машины само понятие клиренса практически теряло смысл. Танк предназначался для прорыва подготовленной обороны противника и действий на труднопроходимых для обычных танков участках местности. «Изюминкой» «279-го» была его уникальная ходовая часть, в которой применялась нерегулируемая гидропневматическая подвеска и ленточный четырехгусеничный движитель. В состав движителя входили 4 гусеничные ленты с закрытым металлическим шарниром, 4 ведущих колеса, 4 направляющих колеса, 24 опорных катка малого диаметра и 12 поддерживающих катков. Ходовая часть была смонтирована на двух продольных пустотелых балках, которые выполняли роль топливных баков.
Танк имел литую башню, а корпус был сварен из четырех литых блоков. Лобовая и бортовая броня корпуса и башни у этого танка не пробивалась 122-мм бронебойным и 90-мм кумулятивным снарядами при всех углах обстрела. Кроме того, криволинейная конструкция литого корпуса предусматривала противокумулятивные экраны, дополнявшие его обводы до вытянутого эллипсоида. Такая форма корпуса должна была предотвратить переворачивание танка ударной волной ядерного взрыва. Среди всех тяжелых танков «Объект 279» имел наименьший забронированный объем (11,47 м3).
Вооружение танка включало 130-мм пушку М-65 с полуавтоматическим механизмом заряжания и механизированной боеукладкой. Боекомплект пушки состоял из 24 выстрелов раздельно-гильзового заряжания. С пушкой был спарен 14,5-мм пулемет КПВТ. Экипаж танка состоял из четырех человек: командира, наводчика, заряжающего (все в башне) и механика-водителя (в корпусе).
Конструкция гусеничного движителя обеспечивала высокую проходимость по глубокому снегу и заболоченной местности. Она исключала посадку танка на днище при преодолении вертикальных препятствий (надолбы, пни, ежи). Среднее давление на грунт составляло всего 0,6 кгс/см2, то есть приближалось к аналогичному параметру легкого танка. Однако конструкция ходовой части была сложной в эксплуатации и ремонте в полевых условиях (особенно это касалось внутренних гусениц), ограничивала возможность уменьшения высоты танка при дальнейшей модернизации и имела большие потери мощности в гусеничном движителе, особенно при движении в распутицу. Еще одним серьезным недостатком четырехгусеничной ходовой части являлось сопротивление повороту, в 12 раз превосходящее величину для аналогичного танка, выполненного по классической схеме. А 22 июля 1960 г. на демонстрации новой техники на полигоне Капустин Яр Н.С.Хрущев категорически запретил прием на вооружение любых танков массой более 37 т, тем самым поставив крест на всей программе тяжелых танков.
Так и не получивший место в войсках «Объект 279» еще долго, вплоть до появления Т-80У, оставался самым мощным танком мира. Ныне единственный построенный «Объект 279» хранится в Музея бронетанкового вооружения и техники в подмосковной Кубинке, являясь его неофициальным символом.
что такое на танке колея и база
Тема раздела Танки в категории Всякое; извиняюсь за тупой вопрос ну что такое на танке колея и база буду очень благодарен.
Опции темы
что такое на танке колея и база
извиняюсь за тупой вопрос ну что такое на танке колея и база буду очень благодарен

Колея́ — в транспорте поперечное расстояние между серединами отпечатков шин/гусенецы на дороге.
Товарищ танкист, скажите пожалуйста, а что самое главное в танке?
Эээ.. понимаешь дружок, самое главное в танке это небздеть!
(Старый армейский анекдот)
ИМХО термин колесная база неприменим к гусеничной технике!
База колёсных транспортных средств (колёсная база) представляет собой расстояние между двумя осями автомобиля – передней и задней. Если смотреть на автомобиль сбоку, то кратчайшее продольное расстояние между центрами переднего и заднего колеса и будет его колёсной базой. Это определение относится к любому двухосному колёсному транспорту.
База трёхосных автомобилей определяется как расстояние между передней и геометрической осями. Геометрическая ось – это условная линия, расположенная между двумя задними осями. В описаниях технических характеристик трёхосных машин колёсная база определяется составным числом. Первая его часть – это расстояние от первой оси до второй. Вторая цифра – это расстояние между задними осями (колёсная база задней тележки). Например, база автомобиля МАЗ 6430А8-320-012 будет представлена в виде двух слагаемых: 3200 мм+1400 мм.
Колесной базой многоосной машины при установлении испытательного коридора является расстояние между осями первого и последнего заднего мостов.
В танкостроении оперируют другими терминами и понятиями!
см ссылку Ходовая часть танков
Добавлю еще одну интересную ссылку
http://www.redov.ru/transport_i_avia. 010_04/p10.php
Для гусеничной техники база = длина опорной поверхности гусениц. То есть расстояние между осями первого и последнего ОПОРНЫХ катков.
В случае если напрвляющее и ведущее колесо тоже выполняют опорную функцию, находясь на ровном твердом грунте (например у бульдозеров и экскаваторов), то тогда принимают во внимание и их.
Если несложно, дайте пожалуйста ссылку на первоисточник этой информации.
Мне кажется это утверждение весьма надуманным, ибо в разных конструкциях подвески расстояние между опорными катками может изменяться.
Например MBT70 
Или STRV-103 
Или БМД 
Первое:
Первоисточник любой учебник или справочник по проектированию гусеничной техники.
Второе: (оно же ГЛАВНОЕ)
ВСЕ (абсолютно все) паспортные технические параметры ЛЮБОЙ транспортной техники (танк, бульдозер, автомобиль или хоть даже тепловоз) как линейные (габариты), так и динамические (скорость, ускорение и тому подобное) даются для ПОЛНОЙ МАССЫ изделия (полностью заправленный и полностью загруженный со всем экипажем) замерянные в условиях стандартной атмосфкеры (750 мм рт.ст) и температуры + 25 градусов. У машин с изменяемым клиренсом параметры указываются для штатного (нормального) положения клиренса.
Думаю, что после второго пункта ваш вопрос на счет надуманности сам по себе отпал.
Как прикажите указывать базу для вот этого?

ИЛИ для этого?


Для первого указываются три базы. Для гусеничных опор отдельно и для центров подвеса отдельно.
У второго две базы для каждой секции отдельно.
У гусеничной техники база берется за основу для вычислений площади опорной поверхности. Плюс все силы в поворотах будут распределяться с учетом ее размеров.
Не могу понять ваш вопрос? Вы просто интересуетесь или пытаетесь спорить? Если второе то загляните в мой профиль в графу «интересы».
Век живи, век учись.
«Погуглил», но ненашел учебник или справочник по проектированию гусеничной техники с названием «любой» 
Вопрос принципиальный!
Есть термин «Опорная поверхность». Есть термин «Расстояние между опорными катками». А вот базы для гусеничной техники нет!
Источник
Колесные и гусеничные машины
Год: 1997
Автор: Фролов К.В. (ред.)
Жанр: Машиностроение
Издательство: Машиностроение
ISBN: 5-217-01949-2
Серия: Энциклопедия «Машиностроение» (том IV-15)
http://rutracker.org/forum/viewtopic.php?t=4097691
Термин называется иначе как в колесной технике, но сути это не сильно меняет.
Ну и еще напомню о танках Кристи у которых нусеницы снимались с катков и танк превращался в колесный. У него как расстояние между крайними опорными катками называть? Базой или длиной опорной поверхности? 
Вот-вот.
Это грубо говоря синонимы. Но правильно называть длина опорной поверхности.
А теперь посмотрим что спросил автор темы:
И смотрим на приведенную им иллюстрацию в сообщении номер 4. Потом перечитываем еще раз мое сообщение номер семь.
А если вы погрузитесь не в терминологию а формулы расчетов то поймете что во многих формулах все остается неизменным и одна из составляющих уровнения будет параметром расстояния между колесами (в случае автомобиля) или длины опорной поверхности (в случае гусеничной техники). Собственно отсюда и вытекает суть того что и то и то можно условно называть базой.
Это не аргумент.
А если я скажу, как оленеводы называют «длина опорной поверхности», то вы обидитесь.
Все начинается с правильной терминологии
Слишком много последнее время развелось горе специалистов с тремя классами ЦПШ. 
Я не собираюсь с вами спорить и что-либо вам даказывать. Я также обращаю еще раз внимание на то что правильный термин я уже озвучивал и то что слово «база» я имел в виду как фигуральное. А также на то что ответ мой был не о терминологии а о том что самой поедставляет суть вопроса и то какие именно опрные катки попадают под это понимание. Также я заранее осознаю что мои собеседники в этой ветке не специалисты и с ними, ради общего понимания ими сути, лучше не буквоедствовать и объяснять «на пальцах».
Что такое клиренс у танка
ТЕХНИЧЕСКАЯ ХАРАКТЕРИСТИКА ТАНКА Т-90С
Боевая масса, т 46,5
Длина с пушкой вперед, мм 9530
Длина корпуса, мм 6860
Ширина общая, мм 3780
Ширина по гусеницам, мм 3370
Высота по крыше башни, мм 2230
Забронированный объем танка, мЗ 11,04
Забронированный объем корпуса, мЗ 9,19
Забронированный объем башни, мЗ 1,85
Десантный люк в днище корпуса Есть
Марка пушки 2А46М-4
Калибр пушки, мм 125
Тип затвора Горизонтально-клиновой
Длина отката, мм 300
Расположение противооткатных устройств Симметричное
Тип продувки ствола Эжекционный
Наличие теплозащитного кожуха Есть
Техническая скорострельность, выстр./мин 8
Заряжание, тип Автоматическое
Боекомплект, выстр. (в т. ч. в A3) 42(22)
Типы боеприпасов БПС, БКС, ОФС, УР
Тип выстрела Раздельно-гильзовый
Стабилизатор, тип Электрогидравлический по вертикали Электромеханический по горизонтали
Спаренное вооружение Пулемет
Боекомплект, шт. 2000
Зенитное вооружение Пулемет
Марка КОРД (НСВТ-12,7)
Боекомплект, шт. 300
Дистанционное управление Есть
Управляемое вооружение 9К119 «Рефлекс»
Управляемая ракета 9М119М
Система наведения ракеты По лучу лазера
Максимальная дальность стрельбы, м 5000
Основной прицел наводчика Перископический
Увеличение,кратность 2,7- 12х
Угол поля зрения, град. 20-4,5
Стабилизация поля зрения Независимая по ГН и ВН
Ночной прицел наводчика Тепловизионный
Дальность видения ночью, м 3000
Дублированное управление огнем Есть
Дальномер, тип Лазерный
Диапазон измерения дальности, м 500-5000
Баллистический вычислитель, тип Электронный, цифровой
Основной прибор командира Перископический, Стабилизированный по ВН
Увеличение,кратность 7,5х(Дн.); 5,1 х(Н)
Угол поля зрения, град. 7
Зенитный прицел ПЗУ-7
Ночные приборы командира Пассивно-активный, тепловизор, видеосмотровое устройство
Дальность видения ночью, м До 3000 (тепловизионный канал)
Броневая защита, тип Комбинированная
Бортовые экраны Есть
Дымовые гранатометы, шт. 12
Динамическая защита, тип Встроенная
Комплекс оптико-электронного подавления ТШУ-1 «Штора-1»
Система коллективной защиты от ОМП, тип Общеобменная
Быстродействующая система ППО Есть
Максимальная скорость, км/ч 60
Удельная мощность, л. с./т 21,5
Запас хода по шоссе, км 550
Емкость топливных баков + доп. бочки, л 1200+400
Среднее удельное давление на грунт, кГ/см2 0,938
Ширина преодолеваемого рва, м 2,8
Высота преодолеваемой вертикальной стенки, м 0,85
Максимальный угол подъема, град. 30
Глубина преодолеваемого брода (с предв. подг.), м 1,2(1,8)
Преодолеваемая водная преграда с ОПВТ, м 5
Тип двигателя Многотопливный дизель
Максимальная мощность, кВт (л.с.) 736(1000)
Максимальный крутящий момент, кГм 403
Число цилиндров 12
Расположение цилиндров V-образный, развал 600
Тип системы охлаждения Жидкостная
Масса двигателя, кг 1020
Удельный расход топлива, г/л.с.ч 170
Тип трансмиссии Механическая, планетарная
Коробка передач, тип Две бортовые планетарные
Число передач вперед/назад 7/1
Минимальный расчетный радиус поворота, м 2,79
Остановочный тормоз, тип Дисковый, работающий в масле
Масса трансмиссии, кг 1870
Бортовой редуктор, тип Планетарный
Система управления движением, тип Гидравлическая
Подвеска, тип Торсионная
Динамический ход катка, мм 320
Амортизаторы, тип (количество) Гидравлический, лопастной, (6)
Гусеница, тип соединения траков Параллельное
Тип шарнира гусеницы РМШ
Ширина колеи, мм 2790
Длина опорной поверхности гусеницы, мм 4270
Ширина гусеницы, мм 580
Число траков, шт. 81
Число опорных/поддерживающих катков на борт 6/3
Диаметр опорного катка, мм 750
Тип амортизации опорных катков Наружная
Механизм натяжения, тип Червячный
Масса ходовой части, кг 8570
Аппаратура внутренней связи и коммутации ТПУ Р-174
Дальность связи в движении, не менее, км 20
Количество заранее подготовленных частот 10
Система кондиционирования СКС-3
Хладопроизводительность, Вт 2900
Оборудование для самоокапывания: Тип Встроенное бульдозерное
Ширина отвала, мм 2140
Оборудование подводного вождения: Тип Съемное
Время монтажа съемного оборудования, мин 15
Глубина преодолеваемой водной преграды, м 5
Время на подготовку к ведению огня после преодоления водной преграды Не требуется
Средства снижения заметности Тепломаскировка, деформирующее окрашивание
Средства разминирования Навесной минный трал КМТ-7 или КМТ-
Периодичность ТО- 1, км 2500-2700
Периодичность ТО- 2, км 5000-5200
Время выполнения работ ТО-1, ч 12
Время выполнения работ ТО-2, ч 30
Время выполнения КО, ч 0,25
Время подготовки к выходу из парка при темп, выше +5°С, мин. 12
Время подготовки объекта к боевому применению, мин. 30
Назначенный ресурс до отправки в капитальный ремонт, тыс. км 11

Танк Т-90 с двигателем В-8 4МС (вид сверху, вид снизу)


Общий вид танка Т-90 с двигателем В-84МС (продольный разрез и вид сверху с вырезами по корпусу и башне)

Совершенствование ходовой части танков
полковник А. Тельминов, полковник А. Загудаев
(Техника и вооружение. — 1989. — № 11. — С. 6-8)
Материал предоставлен: Сергей Зыков
 |
По материалам иностранной печати
Системы подрессоривания танков с момента их создания претерпели значительные конструктивные изменения — от жесткого крепления опорных катков к корпусу и использования в качестве упругих элементов металлических рессор и пружин до торсионных валов, гидравлических и гидропневматических систем. При этом применяются индивидуальные и блокированные подвески.
На современных зарубежных танках используются в основном индивидуальные системы подрессоривания с торсионными валами в качестве упругих элементов и гидравлическими амортизаторами. Они значительно превосходят пружинные блокированные системы, которые обеспечивают плавность хода танка лишь на малых скоростях, к тому же они менее живучи.
Основным предназначением рессоры, торсиона, пружины подвески является уменьшение усилий, передаваемых от катков танка на его корпус. Для этого рессора должна иметь «мягкую» характеристику. Чтобы уменьшить амплитуду колебаний и обеспечить быстрое их гашение, на элементах подвесок устанавливаются амортизаторы (демпферы), преобразующие кинетическую энергию колебаний корпуса в тепло с отводом его в атмосферу. Так как усилия от катков передаются на корпус танка и через амортизаторы, то сила их сопротивления при прямом ходе катка, когда он движется к корпусу, должна быть небольшой, а при обратном — возрастающей, препятствуя перемещению корпуса вниз.
Конструкторы стремятся добиться оптимального соотношения между характеристиками рессор и амортизаторов. Трудность создания «мягкой» торсионной рессоры связана с ограничением торсиона по длине (не больше ширины корпуса танка) и углу его закрутки (считают, что возможности повышения прочностных характеристик торсионов в настоящее время практически исчерпаны). Для обеспечения достаточно большого динамического хода катка при движении по неровностям статический угол закрутки торсиона под действием веса танка, воспринимаемого катком, должен составлять примерно треть от полного угла закрутки. Это и определяет жесткость рессоры, которую можно уменьшить лишь за счет увеличения числа опорных катков, что и является одной из причин перехода в ряде стран к 7-опорной схеме ходовой части танков. Еще один недостаток торсионных рессор, по мнению зарубежных специалистов, — их линейная характеристика, не обеспечивающая достаточную энергоемкость подвески.
Возможности дальнейшего совершенствования торсионных подвесок зарубежные специалисты связывают с применением более сложных конструкций рессор. Примером такого решения может служить трубчато-стержневая подвеска танков (см. 4-ю стр. обложки). Она состоит из двух трубчатых торсионов, внутри которых расположен торсионный вал, работающий последовательно с одной из труб. Такая конструкция позволила увеличить общий угол закрутки торсионов и уменьшить их жесткость. Вторая торсионная труба начинает работать после того, как выбрано 80% динамического хода катка от кулачковой муфты на оси балансира, благодаря чему на конечном участке повышаются характеристики жесткости рессоры. Нелинейная характеристика трубчато-стержневой рессоры более благоприятна для обеспечения плавности хода танка. Однако, по мнению зарубежных специалистов, данное решение далеко от совершенства из-за недостаточной энергоемкости трубчатых торсионов.
Определенные надежды возлагаются на применение гидропневматических подвесок (ГПП). Они имеют прогрессивную нелинейную характеристику, близкую к оптимальной, обеспечивающей высокую плавность хода и возможность существенного увеличения динамического хода опорных катков. Упругим элементом таких подвесок является газ в замкнутом объеме, а масло используется для его герметизации и в качестве рабочей жидкости амортизатору При совмещении рессоры и амортизатора в одном корпусе ГПП становится более компактной, при ее наружном расположении освобождается внутренний объем танка, а кроме того, появляется возможность сравнительно легко регулировать его клиренс, управлять характеристиками подвески.
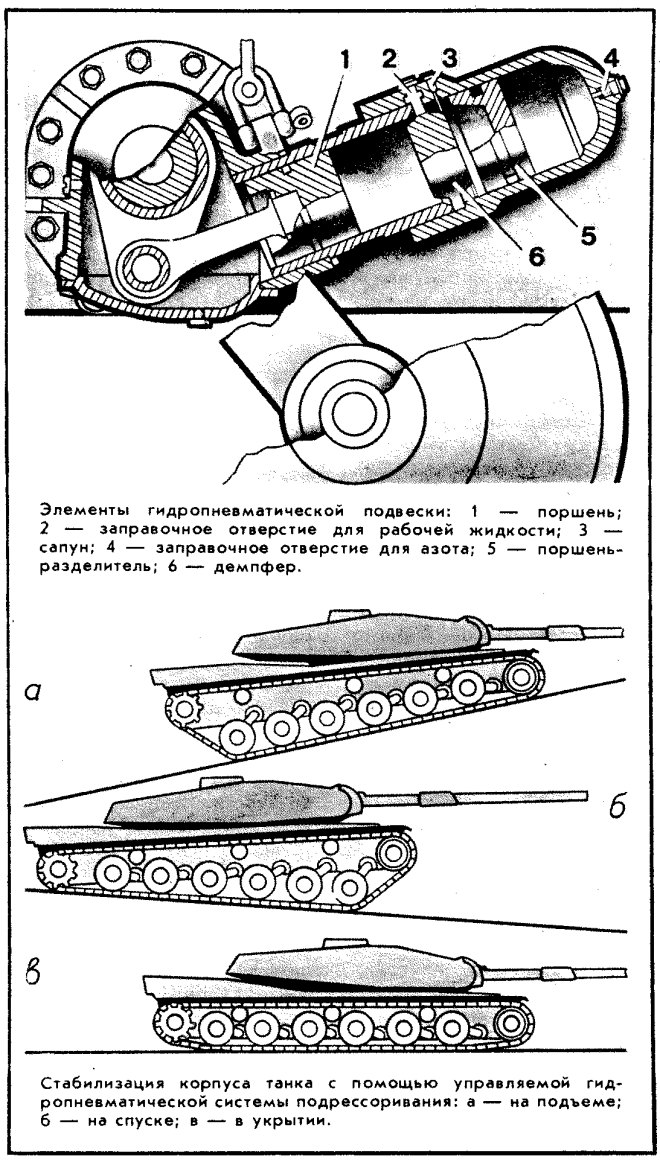
Однако, как сообщалось, в ходе работ выявились серьезные недостатки этих конструкций. Низкая теплорассеивающая способность приводит к нагреванию газа, нежелательному увеличению жесткости рессоры и неконтролируемому изменению клиренса. Весьма трудно обеспечить надежное разделение газа и жидкости, а также герметизацию подвески в целом. Выяснилось к тому же, что система изменения клиренса требует гораздо большего отбора мощности от двигателя, чем предполагалось, а кроме того, с применением этой довольно сложной системы значительно снижается надежность всей системы подрессоривания. Поэтому большинство разработок ГПП, как сообщалось, не вышли за рамки опытных образцов.
В системах подрессоривания зарубежных танков используются, как правило, поршневые телескопические гидроамортизаторы. С увеличением веса основных танков и скоростей их движения значительно возрастают требования к энергоемкости и соответственно к теплорассеивающей способности амортизаторов. Поэтому наметилась тенденция к применению лопастных гидроамортизаторов, имеющих большую площадь контакта с броней корпуса, что обеспечивает лучший теплоотвод. Кроме этого, лопастные гидроамортизаторы по сравнению с телескопическими обладают и лучшими компоновочными свойствами, так как могут устанавливаться соосно с балансиром.
Сила сопротивления гидроамортизаторов пропорциональна квадрату скорости перемещения опорного катка, что предопределяет их высокую энергоемкость и эффективность при движении танка по большим неровностям. Однако, когда неровности малы, перемещения катков незначительны и рессоры практически не работают. В этом случае сопротивление гидроамортизаторов резко увеличивается и на корпус танка передаются интенсивные высокочастотные вибрационные нагрузки. Вибрация влияет на точность работы стабилизатора вооружения, ухудшает условия обитаемости экипажа.
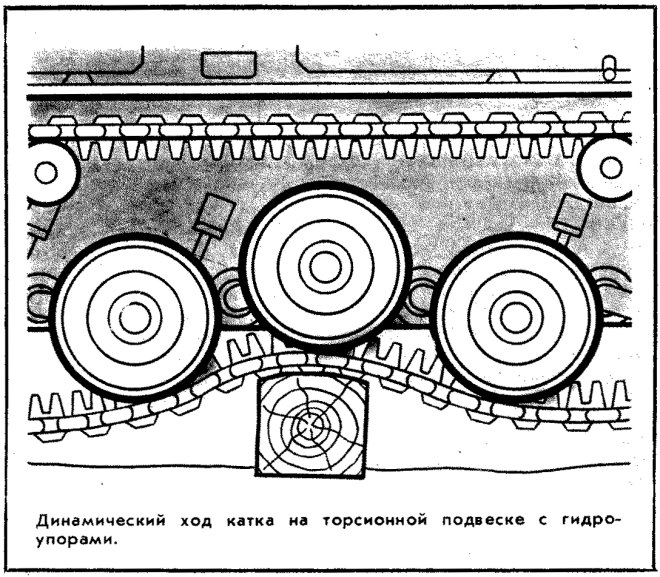
Стремление избавиться от этого недостатка привело зарубежных конструкторов к разработке фрикционных амортизаторов с сопротивлением, пропорциональным ходу катка. Однако, как сообщалось, они из-за малой энергоемкости оказались неэффективными при движении по пересеченной местности. Поэтому пружинные ограничители хода катков в подвеске были заменены так называемыми гидроупорами. По существу, они работают как гидроамортизаторы на последних 140 мм прямого хода катков. За рубежом считают, что по энергоемкости гидроупоры сравнимы с торсионами, причем этот показатель у них почти в 2,5 раза выше, чем у всех фрикционных амортизаторов. Предполагают, что с применением гидроупоров система подрессоривания танка способна обеспечить высокие показатели плавности хода в широком диапазоне скоростей движения.
По мнению зарубежных специалистов, общим серьезным недостатком существующих систем подрессоривания является невозможность обеспечить высокую плавность хода во всем диапазоне реально действующих на корпус танка внешних возмущений. Это связано с тем, что характеристики системы подрессоривания при проектировании выбираются из условия наилучшего демпфирования колебаний в наиболее неблагоприятных резонансных режимах движения. При воздействии же на танк внешних возмущений с другими частотами (до- или зарезонансными) эффективность системы снижается, что приводит к ограничению скоростных возможностей танка, уменьшению эффективности использования вооружения и ухудшению условий работы экипажа.
Одним из перспективных направлений зарубежные специалисты считают создание танковых систем подрессоривания с управляемыми (регулируемыми) характеристиками. Теоретически разработаны два возможных принципа работы таких систем. Один из них базируется на непрерывной локации специальным датчиком (лазерным, радиолокационным или ультразвуковым) профиля пути перед танком. Данные о параметрах неровностей, а также о скорости движения танка и положении его корпуса в пространстве бортовая ЭВМ преобразует в сигналы управления силовыми приводами, которые изменяют характеристики подвесок так, чтобы при наезде опорного катка на неровность возмущения, передаваемые на корпус танка, были минимальными. Для повышения точности стабилизации корпуса в пространстве одновременно может меняться и скорость движения танка. Считают, что такой принцип управления системой подрессоривания может быть реализован на базе гидропневматических рессор.
Для механических систем предлагается более простой вариант управления. Он основан на регистрации отклонений корпуса от заданного положения. По сигналам бортовой аппаратуры мощные силовые приводы подвесок противодействуют этим отклонениям и стабилизируют корпус танка.
Утверждают, что применение управляемых систем подрессоривания позволит практически полностью реализовать скоростные возможности современных танков, значительно упростить и повысить точность стабилизаторов вооружения, улучшить условия работы экипажа. Однако создание таких систем связано со значительным их усложнением. Необходимо решить ряд проблем, связанных с обеспечением надежности элементов и системы в целом, ее быстродействия, экономичности и эффективности. Кроме того, для функционирования этих систем требуются дополнительные затраты мощности, которые, по мнению зарубежных специалистов, могут составить 10—15% от мощности двигателя.
Маневренность и проходимость танка, особенно на заболоченных, песчаных и других грунтах со слабой несущей поверхностью, непосредственно зависит от совершенства гусеничного движителя. Его элементы подвержены наибольшим, по сравнению с другими агрегатами танка, нагрузкам и непосредственно взаимодействуют с абразивной и агрессивной средами. В связи с этим при его разработке или модернизации существенно возрастают объем и трудоемкость теоретических исследований, результат которых прогнозировать весьма сложно. Поэтому работы по улучшению долговечности, надежности, противоминной стойкости и других характеристик отдельных элементов движителя проводятся, как правило, на натурных образцах в ходе их испытаний.
Задача обеспечения высокой долговечности гусеничного движителя, определяемой ресурсом гусениц, решается в первую очередь за счет применения в их конструкции резинометаллических шарниров. Однако, как сообщалось, в настоящее время у зарубежных специалистов нет единого мнения и однозначных решений по конструкциям этих шарниров. Отмечают серьезные неудачи при создании новых гусениц.
Для улучшения сцепления гусениц с грунтом планируют применять сменные резиновые подушки и дополнительные металлические грунтозацепы. Чтобы уменьшить вибрацию, передаваемую на корпус танка, совершенствуется конструкция беговой дорожки гусеницы. Кроме того, ведутся работы по исследованию вариантов расстановки опорных катков в зависимости от шага траков, предлагается упругое соединение бортовых редукторов, механизмов натяжения гусениц и поддерживающих катков с корпусом танка, что, по мнению зарубежных специалистов, позволит снизить уровень вибрации на 30—70%.
Уменьшить массу и нагруженность гусениц пытаются за счет применения новых материалов. В частности, возлагают надежды на композитные материалы и пластмассы. Однако отмечают, что дефицит подобных материалов не позволяет надеяться на ощутимые успехи в ближайшем будущем.
Другим возможным решением считают применение в гусеничных движителях различных компенсирующих устройств, а в перспективе и систем автоматического регулирования натяжения гусениц. Однако это связано с усложнением конструкции ходовой части, увеличением массы и объема, ее удорожанием.
Полковник А. ТЕЛЬМИНОВ, кандидат технических наук;
полковник А. ЗАГУДАЕВ, кандидат технических наук