Винты регулируемого шага




![]()
Для рыбопромысловых судов в эксплуатационных условиях характерны частые изменения буксировочного сопротивления, скорости и осадки при применении орудий лова, подъеме улова на борт, приеме и расходовании топлива и воды и других операциях. В этих изменяющихся условиях плавания ВФШ не позволяют снимать с двигателя полную мощность, что приводит к снижению скорости траления и свободного хода. Кроме того, на добывающих судах с ВФШ за одни сутки промысловой работы приходится десятки раз реверсировать двигатель, в результате чего резко снижается срок его службы. При дрифтерном и ярусном лове, подъеме улова и т.п. судно должно двигаться с малой скоростью, однако на судах с ВФШ это практически невозможно, так как минимально устойчивая частота вращения двигателя довольна велика. Поэтому приходится с интервалом в несколько минут запускать и останавливать двигатель. Такая работа двигателя вызывает ускоренный износ ее движущихся частей, т.е. уменьшает моторесурс двигателя.
Винты регулируемого шага (ВРШ), лопасти которых специальным механизмом поворачиваются относительно осей, перпендикулярных оси вала, не имеют большинства недостатков, присущих ВФШ. Путем разворота лопасти (изменив шаговое отношение), всегда можно привести винт в соответствие с двигателем; без изменения направления вращения двигателя осуществить реверс судна и получить самые малые, и даже нулевую скорости судна при любой частоте вращения винта.
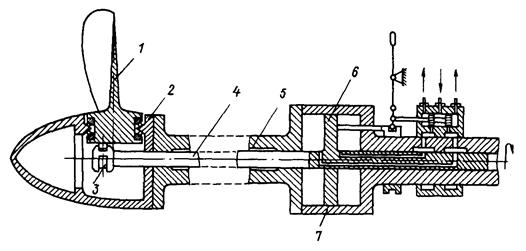 |
Рисунок 5.14 − Принципиальная схема ВРШ
1– лопасть; 2 – ступица; 3 – ползун; 4 – штанга; 5 – гребной вал;
6 – поршень; 7 – цилиндр
ВРШ (рис. 5.14) состоит из ступицы, поворотных лопастей, механизма поворота лопастей, расположенного в ступице, механизма изменения шага (МИШ) и привода механизма поворота лопастей, располагаемого в валопроводе. Управление ВРШ осуществляется с местного поста и дистанционно. Пост дистанционного управления ВРШ устанавливается в ходовой рубке.
Механизм поворота лопастей управляется механизмом изменения шага. Наиболее распространенные механизмы поворота лопастей показаны на рис. 5.15. На морских судах применяются обычно механизмы двух последних типов, как наиболее надежные. В механизме кулисного типа (рис. 5.15, в) с поступательно движущейся штангой МИШ связан ползун, по направляющим которого перемещается сухарь. В сухарь вставлен эксцентрично закрепленный на лопасти палец. При поступательном движении штанги ползун передвигает палец и разворачивает лопасть. В механизме шатунного типа (рис. 5.15, г) движение штанги передается шатуну, который поворачивает лопасть.
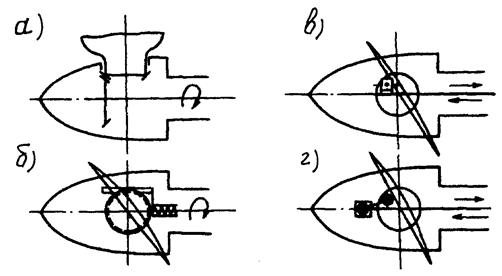
Рисунок 5.15 − Механизм поворота лопастей: а – шестеренчатый;
б – винтовой; в – кулисный; г – шатунный
Механизмы изменения шага по типу привода могут быть ручными, механическими, гидравлическими, электромеханическими и электрогидравлическими. Ручные и механические приводы применяются на винтах небольших размеров. Большинство ВРШ имеют гидравлические приводы, так как они обладают простотой, высокой надежностью, малыми габаритами и развивают большие усилия. Механизм изменения шага винта размещают внутри ступицы, внутри валопровода и вне валопровода и винта. На промысловых судах МИШ устанавливается, как правило, в валопроводе, реже в ступице. На рис. 5.15 приведена схема ВРШ с МИШ, расположенным в валопроводе. Штанга, поворачивающая лопасть, проходит через полый гребной вал. Кормовой конец штанги связан с ползуном, носовой – с поршнем, который под давлением рабочей жидкости, подаваемой в одну из полостей цилиндра, передает через штангу поступательное движение ползуну. При большой длине штанги и значительных деформациях валопровода может возникнуть опасность несрабатывания механизма поворота лопастей и аварии МИШ. Этот недостаток устраняют, размещая МИШ в ступице несколько больших размеров или в кормовом подзоре судна.
ВРШ обладают следующими преимуществами по сравнению с ВФШ:
— обеспечивают полную мощность двигателя при широком диапазоне изменения скоростей, что важно при движении судна во льдах, при различных водоизмещениях, при тралении, при буксировке других судов и т.п.;

— обеспечивают любое значение скорости от наибольшего переднего до наибольшего заднего хода, без реверсирования двигателя и изменения направления и частоты вращения гребного винта;
— реализуют экономический ход судна по заданной оптимальной программе, обеспечивающей наилучшую комбинацию шага и частоты вращения.
Помимо перечисленных, ВРШ позволяют получить и другие менее принципиальные, но важные преимущества по сравнению с ВФШ, облегчающие управление судном с мостика. К ним относятся:
— существенное сокращение времени и расстояния, проходимого судном при экстренной остановке (в 1,5 раза меньше выбег) и реверсе;
— обеспечение только дистанционного управления с мостика;
— повышение маневренных качеств судна, в частности облегчение швартовок, исключение рывков при буксировке и т.п.;
— облегчение пуска двигателей, который осуществляется при положении лопастей ВРШ в нулевом шаге; при этом уменьшается число пусков и увеличивается моторесурс двигателя;
— возможность судна, оборудованного ВРШ, продолжительное время стоять на месте в ожидании лоцмана, для ориентации в обстановке, не останавливая вращения гребных винтов и прогревая двигатели; это обеспечивается установкой шага лопастей в нулевое положение;
— возможность замены съемных лопастей, не выводя судно из эксплуатации.
К недостаткам ВРШ относятся следующие:
— КПД ВРШ на расчетном режиме за счет повышения диаметра ступицы ниже КПД ВФШ на 1  2%;
2%;
— масса ВРШ существенно превышает массу ВФШ;
— сложность конструкции и дороговизна.
Что такое миш на судне
Схемы и классификация ВРШ
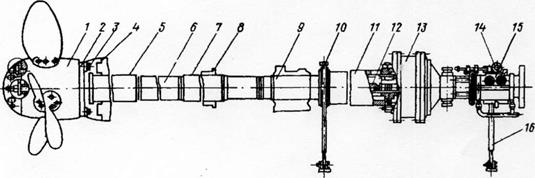
Схема установки ВРШ на судне приведена на рис. 1. Она состоит из следующих основных частей: поста управления 2 с маневровой рукояткой 1; электромагнитов 3 системы управления; распределительных золотников 4 для силового масла; механизма изменения шага (МИШ) 5; гребного вала-валопровода 6; гребного винта с поворотными лопастями (ВПЛ) 7; силовой системы насоса для подачи масла (на схеме не показана).
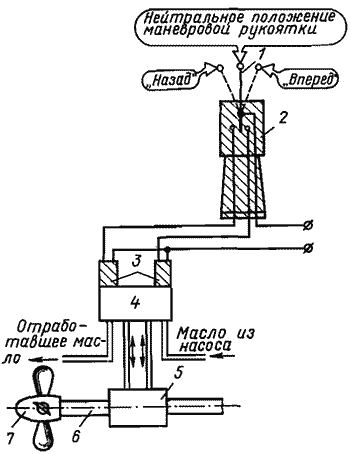
Рис. 1. Схема установки ВРШ.
Установка работает следующим образом. При нейтральном положении маневровой рукоятки 1 распределительный золотник 4 находится в нейтральном положении, и масло, подаваемое насосом, циркулирует, не совершая работы. Вращение двигателя через валопровод 6 передается ВПЛ 7, который вращается с установленным шагом лопастей, осуществляя определенный режим движения судна.
При отклонении маневровой рукоятки 1 в положение «Вперед» распределительный золотник 4 смещается электромагнитами 3 в какую-либо сторону — например вправо. При этом силовое масло от насоса по правой трубе поступает в МИШ, а по левой уходит на слив. Сервомотор МИШа создает необходимое усилие и посредством механизма поворота лопастей (МПЛ), размещенного в ступице ВПЛ, синхронно поворачивает лопасти винта в сторону увеличения их шага. Когда шаг поворота лопастей винта достигнет заданного (по приборам), маневровая рукоятка возвращается в нейтральное положение. При этом распределительный золотник также возвращается в среднее положение с помощью обратной связи; подача масла в МИШ прекращается и ВПЛ обеспечивает новый режим движения судна при увеличенном шаге лопастей. Если отклонить рукоятку 1 в положение «Назад», распределительный золотник 4 сместится в обратную сторону, т. е. влево. При этом положении силовое масло от насоса будет поступать в МИШ по левой трубе, а уходить на слив по правой. Сервомотор через МПЛ развернет лопасти ВПЛ в обратную сторону и уменьшит шаг до требуемого. Вследствие этого при постоянной частоте вращения двигателя и валопровода уменьшится скорость судна па передний ход. Фиксация нового положения лопастей осуществляется так же, как в предыдущем случае — установкой маневровой рукоятки в нейтральное положение.
Если установить лопасти ВПЛ на нулевой шаг, судно потеряет ход при работающем двигателе и вращающемся винте.
Для получения заднего хода лопасти тем же способом разворачивают от нулевого шага на обратный. Судно начинает двигаться задним ходом при сохранении постоянного направления вращения двигателя и валопровода.
Рассмотренная система управления ВРШ устроена по так называемому «неследящему» принципу. Неследящая система отличается тем, что изменение шага лопастей ВПЛ продолжается до тех пор, пока маневровая рукоятка будет отклонена от нейтрального положения, и изменение шага лопастей зависит от продолжительности отклонения маневровой рукоятки. Для фиксации положения лопастей рукоятку возвращают в нейтральное положение, как только прибор — указатель положения лопастей покажет, что лопасти развернуты на требуемый шаг. Неследящая система управления ВРШ по устройству наиболее проста, но требует постоянного наблюдения за приборами и удержания маневровой рукоятки судоводителем, пока происходит изменение режима. В период сложных маневров это не позволяет судоводителю уделять достаточно внимания контролю за положением судна и другим важным операциям управления.
При следящей системе управления маневровая рукоятка устанавливается в определенное положение, соответствующее развороту лопастей на требуемый шаг. В остальном операция разворота лопастей осуществляется автоматически, без участия человека. После того как лопасти ВПЛ займут требуемое положение, сервомотор МИШ останавливается и удерживает лопасти на заданном шаге. Таким образом, следящая система управления ВРШ более удобна, но устройство ее сложнее.
Кроме разделения по принципу системы управления на следящие и неследящие, ВРШ можно классифицировать по следующим основным признакам:
По диапазону поворота лопастей можно выделить три группы ВРШ:
По роду энергии (привода), используемой для работы МИШ, различают следующие виды ВРШ:
По характеру связи дистанционного управления ВРШ и двигателя возможны следующие варианты:
Вторая система является более экономичной, но отличается большей сложностью устройства и управления. В обоих случаях необходимы контроль за работой двигателя из ЦПУ машинного отделения и корректировка с целью предохранения двигателя от перегрузки.
Конструктивные особенности МДК с ВРШ
Особенности МДК с ВРШ связаны прежде всего с конструкцией самого гребного винта и наличием механизма изменения шага (МИШ), представляющего собой одновременно и элемент судового валопровода. В состав МДК с ВРШ входит и специальная система управления МИШ, воздействие которого на регулирующие органы может быть осуществлено как с местных постов управления, так и дистанционно из ЦПУ или из ходовой рубки. Валы, расположенные в корму от вала
МИШ (обычно только гребной) имеют сверление для размещения штанги, соединяющей поршень гидроцилиндра МИШ с устройством поворота лопастей, смонтированным в ступице гребного винта.
ВРШ различают по углу разворота лопастей и принципу создания усилия, необходимого для их поворота.
МДК с ВРШ могут быть оборудованы гидравлическим, электромеханическим и ручным приводом МИШ. На промысловом флоте наибольшее распространение получили ВРШ с гидравлическим приводом МИШ. Электромеханический привод МИШ можно встретить лишь в МДК мощностью 600. 700 кВт. На относительно небольших промысловых судах и катерах (Ne = 200 кВт) довольно часто применяют и ручной привод, т. е. перекладка лопастей ВРШ в этих случаях осуществляется за счет мускульной силы человека.
МДК с ВРШ промысловых судов оборудованы, как правило, следящими системами управления, в которых каждому положению управляющего органа соответствует строго определенное положение лопастей ВРШ. В неследящей системе управления отклонение управляющего органа от нейтрального положения вызывает поворот лопастей, а возвращение органа в нейтральное положение останавливает вращение лопасти вокруг своей оси.
На некоторых рыболовных траулерах реализовано программное управление МДК с ВРШ при работе на режимах долевых нагрузок, предусматривающее одновременное воздействие на шаговое отношение ВРШ и топливную рейку главных ДВС, обеспечивающее при заданной скорости судна, минимальный расход топлива на милю пути. Однако такая система может быть реализована лишь в том случае, если в составе МДК отсутствуют валогенераторы, для которых требуется постоянная частота вращения МДК.
По конструктивному исполнению ВРШ довольно разнообразны и могут отличаться конструкцией узла заделки лопастей в ступице, кинематическими схемами механизмов поворота лопастей, расположением и конструкцией МИШ, способами фиксации шага и системами управления.
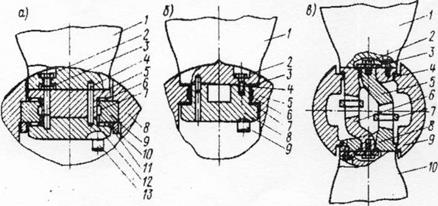
Конструкции узла заделки лопастей. Узлы заделки лопастей в ступице считаются наиболее ответственным в конструкции винта с поворотными лопастями (ВПЛ). Недостаточная надежность узлов заделки лопастей может быть причиной аварий с самыми тяжелыми последствиями. Заклинивание лопастей приводит не только к ограничениям в
использовании мощности ДВС, но и к полной потере хода судном, например, при заклинивании лопастей в положении шага нулевого упора или потере части лопастей.
Заклинивание лопастей в положении „Назад» исключает возможность ведения промысла, а в случае нереверсивных главных ДВС судно может двигаться лишь „Вперед» кормой.
На узлы заделки лопастей действуют гидродинамические и центробежные силы, возникающие при вращении гребного винта, а также и моменты, скручивающие лопасти, причем сочетания этих сил и моментов в условиях эксплуатации траулеров может быть самым различным. Конструкцию узла заделки лопасти выбирают исходя из того, какие силы и моменты оказывают определяющее влияние на его прочность.
Если в балансе сил и моментов преобладают изгибающие моменты от гидродинамических сил, то применяют заделку плоского типа. Если доминирующей оказывается центробежная сила, то предпочтителен радиальный тип заделки. В большинстве конструкций ВРШ, в том числе и отечественного производства, применена плоская заделка лопастей, обеспечивающая большую прочность.
На рисунке 3.21 показаны схемы узлов заделки лопастей, наиболее часто встречающиеся на отечественных траулерах. Следует отметить, что радиальная заделка лопастей (см. рисунок 3.21, в) не может быть реализована в трехлопастных винтах, а в случае четырехлопастных ВРШ каждую пару противоположных лопастей требуется располагать по схеме „тандем». Цапфы 5 и 6, выполненные в виде кривошипов относительно оси вращения лопастей, занимают все сечение ступицы, и цапфы второй пары лопастей могут быть размещены в сечениях либо в нос, либо в корму от первой.
Механизмы поворота лопастей. Подавляющее большинство механизмов поворота лопастей предназначено для преобразования возвратно-поступательного движения штанги во вращательное движение лопастей вокруг своей оси. Подобные преобразования могут быть достигнуты посредством зубчатой рейки и зубчатого колеса или кривощипно- шатунных (КШМ) и кривошипно-кулисных механизмов (ККМ). Большая часть ВРШ промысловых судов имеют кривошипно-шатунные или кривошипно-кулисные механизмы поворота лопастей.
На рисунке 3.22 показаны два варианта кривошипно-шатунных механизмов поворота лопастей, отличающиеся тем, что точка крепления шатуна к ползуну (управляющей штангой) у одного находится на оси валопровода (рисунок 3.22, а, аксиальный КШМ), а у другого смещена от нее (рисунок 3.22, б, дезаксиальный КШМ). Два варианта кривошипно- кулисного механизма, схемы которых представлены на рисунок 3.22, в, г отличаются тем, что кулисный камень в схеме на рисунок 3.22, в закреплен в поворотной шайбе лопасти, а его направляющая выфрезерована в ползуне, в то время, как в схеме на рисунок 3.22, г кулисный камень перемещается вместе с ползуном, а его направляющая выполнена за одно целое с поворотной шайбой лопасти.
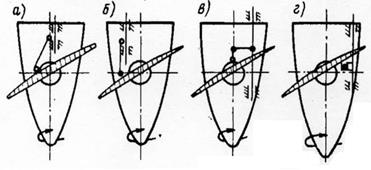
Рисунок 3.22 – Кинематические схемы механизмов поворота лопастей:
а, б – кривошипно-шатунные; в, г – кривошипно-кулисные
По своим эксплуатационным качествам приведенные схемы механизмов поворота лопастей примерно одинаковы. Однако наибольшее распространение на промысловом флоте получили ККМ.
Механизмы изменения шага. Как уже отмечалось выше, на промысловых судах применяются почти исключительно гидравлические МИШ, обычно размещаемые в специальном валу, входящем в состав судового валопровода; МИШ могут быть размещены и в ступице гребного винта. На МИШ возлагаются следующие функции:
— подвод энергии (рабочей жидкости) к сервомотору, если последний вращается вместе с валопроводом;
— создание усилия, необходимого для поворота лопастей;
— фиксация лопастей в заданном положении;
— обеспечение обратной связи с помощью устройства отсчета шага, связанного с управляющим органом;
— обеспечение аварийной перекладки и фиксации шага. Однако в некоторых конструкциях МИШ могут отсутствовать узлы или устройства. предназначенные для выполнения каких-либо из перечисленных функций. В частности, если сервомотор не вращается вместе с валогенератором, то в составе МИШ отсутствует устройство для подвода масла во вращающийся валопровод.
Конструктивное исполнение МИШ и его отдельных элементов весьма разнообразно, однако в большинстве конструкций МИШ применяют гидравлические сервомоторы, представляющие собой цилиндр с поршнем, встроенный в валопровод и вращающийся вместе с ним, либо расположенный вне валопровода.
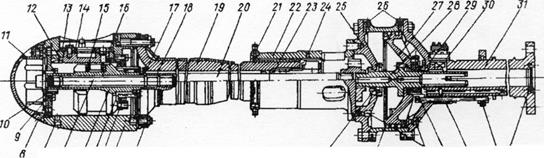

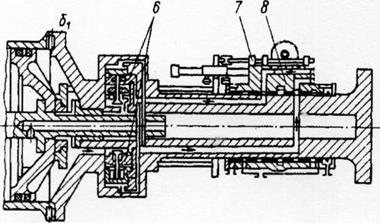
Вал МИШ полый. Оба конца вала снабжены фланцами: носовым для подсоединения к промежуточному валу валопровода, а кормовым для крепления гидроцилиндра 37. С кормы цилиндр закрывается кормовой стенкой 25, которая соединяется с полумуфтой гребного вала. На кормовой стенке закреплен ограничитель хода поршня 27, а в специальной концентрической расточке размещен подшипник штанги МИШ 38. Носовой ее подшипник 29 установлен в расточке утолщения вала МИШ.
У кормового фланца вала МИШ смонтированы два гидравлических фиксатора шага 30. В носовой части вала установлена букса для подвода масла в гидроцилиндр, состоящая из двух половин, стянутых болтами. По торцам буксы выполнены проточки для отвода утечек масла в сборный бак, за ними установлены специальные торцевые уплотнения. Разрез буксы для ввода масла и фиксатора шага показан на рисунке 3.24. От маслобуксы масло через сверление в валу и фиксаторы шага поступает к той или другой полости гидроцилиндра. От проворачивания маслобукса удерживается реактивной штангой 16 (см. рисунок 3.25), а от осевого смещения специальным буртом, залитым баббитом. К маслобуксе подсоединены два трубопровода, подводящие масло от управляющего золотника, который связан с пультом управления ВРШ.
Фиксация шага основана на одновременном автоматическом запирании масла в обеих полостях гидроцилиндра МИШ. Например, при перекладке лопастей масло от управляющего золотника подводится в канал А маслобуксы и через проточки и по сверлениям в валу поступает в цилиндр фиксатора 1 в пространство над подпружиненным клапаном 2 и открывает его, благодаря чему масло поступает в носовую полость гидроцилиндра. Одновременно масло из канала А поступает через канал а в полость под золотником 4, который под давлением масла перемещается к оси вала МИШ, и своей внутренней поверхностью нажимает на шток клапана 2 и открывает доступ масла из кормовой полости гидроцилиндра через канал Г в канал В. В результате разности давлений в носовой и кормовой полостях гидроцилиндра поршень перемещается в корму, а масло из кормовой полости вытесняется через клапан 5, канал Б к маслобуксе и далее во внешнюю гидравлическую систему. При работе на задний ход масло поступает из канала 5 через канал б и отводится через канал А.
Управление и контроль работы МДК с ВРШ осуществляется из ЦПУ и с ходового мостика.
Конструкция МИШ, изображенная на рисунке 3.28, принципиально отличается от описанной выше, МИШ состоит из неподвижной 14 я подвижной 15 (в осевом направлении) обойм, каждая из которых посажена на радиально-упорные подшипники 11, напрессованные на резьбовые втулки 12. Втулки и внутренние обоймы подшипников вращаются вместе с винтом.
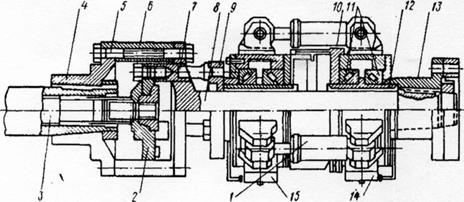
Наружные обоймы подшипников и кольца, снабженные тремя проушинами, расположенными под углом 120°, удерживаются от вращения реактивной оттяжкой, крепящейся к набору корпуса судна. Между обоймами установлены три гидравлических пресса 1. При подаче масла в прессы плунжеры перемещают в осевом направлении подвижную обойму 15, которая через радиально- упорные подшипники 11, фланец 9, толкатели 7 и фланец 2 передает усилие на управляющую штангу.
Подача масла в неподвижные гидропрессы избавляет конструкцию МИШ от маслобуксы, что значительно повышает его надежность и позволяет увеличить давление в гидросистеме в несколько раз и тем самым уменьшить размеры гидроцилиндров.
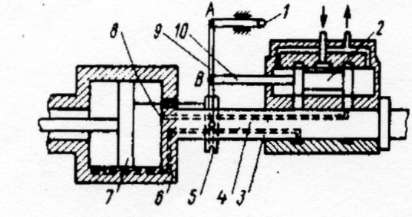
Фиксация положения лопастей гребного винта. Помимо статической фиксации, описанной выше, положение лопастей может быть зафиксировано и с помощью специального золотника, снабженного обратной связью. Такое фиксирующее устройство, схема которого показана на рисунке 3.29, характерно для следящих систем управления ВРШ.
Смещение тяги управления ВРШ 1 вызывает и смещение золотника 2 который открывает доступ масла в одну из полостей гидроцилиндра. Например, при смещении тяги влево золотник также смещается влево и масло под давлением поступает в левую полость гидроцилиндра 6. В результате поршень 7 перемещается вправо, увлекая за собой через тягу 8 и диск обратной связи 5. Поскольку точка А остается неподвижной, то точка В смещается вправо и через связанную с ней тягу 10 двухплечевого рычага 9 перемещает золотник вправо, т. е. в сторону исходного положения. При этом золотник постепенно перекрывает доступ масла в канал 3 и затрудняет его отвод из правой полости по каналу 4. Усилие, передающееся от гребного винта через штангу на поршень 7, уравновешивается разностью давлений на поршень со стороны обеих полостей. При неподвижной точке А положение золотника полностью определяется положением поршня.
Такая система имеет преимущества. Смещение тяги управления 1 вызывает такое пропорциональное перемещение поршня, при котором точка В двухплечевого рычага займет очень близкое к равновесному положение, которое она занимала до начала перекладки лопастей, т. е. фиксирующее устройство составляет по существу элемент следящей системы управления BPLII. Кроме того, в рассматриваемой схеме требования к герметичности гидроцилиндров не столь жестки, как при статической функции шага.
Недостатком же системы фиксации шага является необходимость в непрерывной работе масляного насоса для поддержания давления масла, подводимого к золотнику, в условиях, когда время перекладки лопастей ничтожно мало в сравнении с продолжительностью рейса. Этот недостаток усугубляется тем, что именно в период между перекладками лопастей насос должен развивать значительно больший напор, чем в процессе их перекладки. Чтобы снизить затраты электроэнергии при эксплуатации ВРШ, в качестве питательного насоса гидросистемы применяют насосы переменной подачи. В этом случае к точке В крепят не на шток 10 золотника 2, а рычаг управления подачей насоса. В период между перекладками насос подает лишь такое количество масла, которое компенсирует его утечки в маслобуксе и с напором, достаточным для фиксации шага ВРШ.
 enginering
enginering
 enginering
enginering enginering
На судне установлена система винта регулируемого шага (ВРШ) (проект 394) с гидравлическим приводом, включающая:
— винт с поворотными лопастями (ВПЛ). Основные детали ВПЛ—лопасти,
цилиндрическая ступица, обтекатель. В ступице имеется три окна, в которых
смонтированы узлы комлевой заделки лопастей. Каждая лопасть крепится
шестью болтами. Узел комлевой заделки лопасти уплотняется манжетами.
Поворот лопастей осуществляется за счёт преобразования поступательного
движения ползуна и кулисного механизма. ВПЛ крепится к гребному валу
девятью шпильками и штифтами. В кормовой части ступицы крепится
обтекатель;
— маслобукса служит для подачи масла в радиальные сверления вала МИШ через гидравлические замки. Состоит из двух половин надетых на вал и стянутых болтами. Внутренние поверхности залиты баббитом. В средней части имеется проточка для гребня на валу МИШ, предохраняющая маслобуксу от осевого смещения;
— дистанционное управление состоит из трёх мостов МО, носовая, кормовая рулевые рубки. Пост состоит из тумбы с рукояткой «О » «Вперёд » «Назад «. Рукоятка имеет самовозврат на «О «. Так же на каждом посту имеется указатель разворота лопастей;
— гидравлическая система состоит из основной и аварийной, системы смазки
ВПЛ и системы охлаждения. Основная гидросистема служит для подвода масла к гидроцилиндру МИШ и отводу обратно. Состоит из масляной системы
гидравлики, цистерны сбора утечек, двух гидравлических насосов напором 3,0 МПа (30 кг см), двух пар сдвоенных фильтров, реверсивного золотника, насоса откачки из цистерны утечек. Смазка ВПЛ состоит из напорного маслобочка, расположенного выше оси валолинии на 10м, ёмкости сбора утечек, насоса откачки утечек. Для аварийной перекладки лопастей предусмотрены два ручных насоса и специальные упорные болты, фиксирующие поршень МИШ в гидроцилиндре.
1.2 Судовой валопровод
Дейдвудное устройство обеспечивает опору гребному валу, условия для его вращения и непроницаемость корпуса судна в месте выхода из него валопровода, Дейдвудный подшипник из сегментных бакаутовых планок охлаждается забортной водой. В носовой части дейдвудной трубы имеется сальниковое устройство.
1.3 Валоповоротное устройство