Корректор коэффициента мощности. Схема. Расчет. Принцип действия.
Схема корректора коэффициента мощности (10+)
Корректор коэффициента мощности. Схема. Расчет. Принцип действия
Проблемы отбора мощности классическим выпрямителем
Основной проблемой классического выпрямителя с накопительным конденсатором, работающего от синусоидального или другого непрямоугольного напряжения, является тот факт, что отбор энергии от сети происходит только в те моменты времени, когда напряжение в ней больше, чем напряжение на накопительном конденсаторе. Действительно, конденсатор может заряжаться только если к нему приложено напряжение, большее чем то, до которого он уже заряжен.
Причем в те моменты, когда напряжение сети становится больше напряжения конденсатора, ток зарядки очень велик, а все остальное время он нулевой. Получается, что, например, для синусоидального напряжения питания, наблюдаются всплески тока при достижении напряжением амплитудных значений. Если Ваше устройство потребляет небольшую мощность, то это можно стерпеть. Но для нагрузки, скажем, 1 кВт 220В всплески тока могут достигать 100 А. Что совершенно неприемлемо.
Вашему вниманию подборки материалов:
Конструирование источников питания и преобразователей напряжения Разработка источников питания и преобразователей напряжения. Типовые схемы. Примеры готовых устройств. Онлайн расчет. Возможность задать вопрос авторам
Практика проектирования электронных схем Искусство разработки устройств. Элементная база. Типовые схемы. Примеры готовых устройств. Подробные описания. Онлайн расчет. Возможность задать вопрос авторам
Государственные стандарты на силовые устройства запрещают их изготовление и продажу, если не обеспечивается равномерный отбор мощности.
Чтобы решить эту проблему, применяют корректоры коэффициента мощности.
Простейший корректор коэффициента мощности

Устройство отличается от классического выпрямителя тем, что зарядка накопительного конденсатора осуществляется через дроссель. Электрический ток через дроссель не может измениться моментально. Соответственно, дроссель как бы усредняет ток зарядки. При правильном выборе дросселя, ток зарядки будет идти постоянно, вне зависимости от текущего значения напряжения. Мощность, соответственно, от сети тоже будет отбираться постоянно, а не только при пиках напряжения. Сила тока не будет иметь ярко выраженных всплесков. Все поставленные задачи решены.
Для нормального функционирования схемы нужен дроссель, который не будет насыщаться при максимально возможном потребляемом токе. Индуктивность дросселя должна быть такой, чтобы пульсации тока не превышали 1А, чтобы соответствовать государственным стандартам. Для 50 Гц индуктивность составляет 3 Гн. Для нагрузки 1 кВт такой дроссель, конечно, можно изготовить, но весить он будет более 50 кг, а стоить больше 10 000 рублей с учетом современной цены меди.
Импульсный корректор коэффициента мощности
Силовая импульсная электроника дает другое решение.

Это классический повышающий преобразователь напряжения. Конденсатор, подключенный к мосту, выбирается небольшой емкости, только для фильтрации высокочастотных импульсов. Напряжение на нем пульсирует. Повышающий преобразователь преобразует пульсирующее напряжение в постоянное на конденсаторе C5 за счет ШИМ модуляции. При фиксированном выходном напряжении входной ток пропорционален входному напряжению, то есть изменяется плавно по синусоидальному закону, без скачков и всплесков.
Устройство рассчитано на выходную мощность 500 Вт. Как увеличить мощность устройства, читайте по ссылке.
Добавление от 27.02.2013 Иностранный производитель контроллеров Texas Instruments преподнес нам удивительно приятный сюрприз. Появились микросхемы UC3823A и UC3823B. У этих контроллеров функции выводов немного не такие, как у UC3823. В схемах для UC3823 они работать не будут. Вывод 11 теперь приобрел совсем другие функции. Чтобы в описанной схеме применить контроллеры с буквенными индексами A и B, нужно вдвое увеличить резистор R6, исключить резисторы R4 и R5, подвесить (никуда не подключать) ножку 11. Что касается российских аналогов, то нам читатели пишут, что в разных партиях микросхем разводка разная (что особенно приятно), хотя мы пока новой разводки не встречали.
Смотрите также онлайн расчет дросселя. В форме задайте амплитуду пульсаций тока равной нулю, чтобы получить нужные нам параметры.
Выходное напряжение формируется на конденсаторе C5.
Комментарий: В параметрах дросселя была ошибка, на которую нам указали читатели. Теперь она исправлена. Кроме того, для повышения стабильности работы схемы может быть полезно ограничить максимальное время открытия силового полевого транзистора. Для этого устанавливаем подстроечный резистор между 16 ножкой микросхемы и минусовым проводом питания, а движок соединяем с ножкой 8. (Как, например, на этой схеме.) Подстраивая этот резистор, можно регулировать максимальную скважность импульсов от ШИМ-контроллера.
К сожалению в статьях периодически встречаются ошибки, они исправляются, статьи дополняются, развиваются, готовятся новые. Подпишитесь, на новости, чтобы быть в курсе.
Можно ли предположить, что такой корректор мощности (электронный) позволяет экономить энергию потребляемую из эл. сети? Если да, то будет ли это зависеть напрямую от ёмкосли конденсатора С5? Уточнение: я имею ввиду условия для активной нагрузки, которой безразлично постянное или переменное напряжение. С уважением, Сергей. Читать ответ.
Здравствуйте! Подскажите пожалуйста как рассчитать индуктивность дросселя и ёмкость эл. конденсатора для ‘простейшего корректора коэффициента мощности’ на другую частоту. Например на 100, 200, 300 кГц. Спасибо! Читать ответ.
Здравствуйте! Можно ли обмотку l2 дополнительно использовать для питания: драйверов ir2101 и гальванически связанного с ними контроллера инвертора трехфазного асинхронного двигателя. Питание драйверов верхних ключей бутстрепное. С уважением, Борис Читать ответ.
Здравствуйте! В статье ‘Импульсный корректор коэффициента мощности’ нет достаточной информации о сердечнике дросселя L1. Не могли бы Вы указать материал сердечника, а также его типоразмер, для варианта корректора, мощностью до 100 ватт. С уважением, Гоша. Читать ответ.
устройство для резервного, аварийного, запасного питания котла, циркул.
У меня установлен газовый отопительный турбо котел, требующий электропитания. Кр.
Понижающий импульсный преобразователь напряжения, источник питания. Пр.
Понижение напряжения постоянного тока. Как работает понижающий преобразователь н.
Переменный резистор, потенциометр, сопротивление, управляемое, регулир.
Управляемый напряжением переменный резистор, электронная регулировка сопротивлен.
В чем разница между пассивной и активной корректировкой коэффициента мощности?

Каждый день количество электронных устройств, использующих импульсные источники питания, увеличивается. В результате коррекция коэффициента мощности (cos φ) стала очень важной проблемой, которая привела к созданию нормативных стандартов. Благодаря этим стандартам инженеры-проектировщики / прикладные технологи используют новейшие технологии в пассивных и активных компонентах и интегральных схемах контроллеров (ИС) для создания широкого спектра корректоров коэффициента мощности.
Мощность

Давайте начнем с разговора о концепции коэффициента мощности (PF или более привычно для нас cos φ). ). Предполагая идеально линейную нагрузку с идеальными синусоидальными кривыми тока и напряжения (нет сдвига по фазе), коэффициент мощности системы электроснабжения представляет собой отношение реальной мощности (кВт) к полной мощности (кВА) (рисунок выше).
Он также может быть определен как косинус угла между волнами тока и напряжения. Значение коэффициента мощности может варьироваться от 0 до 1. Когда ток и напряжение полностью совпадают по фазе, коэффициент мощности равен 1.

Идеальные синусоидальные значения токов и напряжений обычно возникают, когда нагрузки состоят из резистивных, емкостных и индуктивных элементов, которые являются линейными (не зависят от тока и напряжения). Этот тип коэффициента мощности обычно связан с промышленным оборудованием, таким как электродвигатели (рисунок выше).

Где PF – коэффициент мощности, а THD – общие гармонические искажения
В настоящее время очень часто можно найти коэффициент мощности, который потребляет ток в несинусоидальной форме волны (рисунок ниже) среди электронных устройств с нелинейными нагрузками. Такие электронные устройства используют преобразование мощности для лучшего контроля или экономии энергии. Такое преобразование мощности достигается с помощью импульсных источников питания, которые обычно используются в ПК, аудиовизуальном оборудовании, флуоресцентном освещении, диммерах, копировальных аппаратах, зарядных устройствах и других устройствах.

На рисунке выше показано, что ток и напряжение идеально совпадают по фазе, даже несмотря на сильное искажение волны тока. Применение «косинуса фазового угла» привело бы к неверному выводу, что этот источник питания имеет коэффициент мощности 1,0. В этом случае коэффициент мощности следует анализировать с точки зрения гармонического ряда основной частоты линии электропередачи. Принимая во внимание абсолютные значения общих гармонических искажений (THD), коэффициент мощности для нелинейных нагрузок может быть определен, как показано на в формуле выше.
Коэффициент мощности, который не равен единице, может вызвать гармонические искажения. Такое искажение может мешать работе других устройств, питающихся от одного и того же источника, что и потребитель, генерирующий высшие гармоники. Глядя на рисунок выше, можно сказать, что для достижения коэффициента мощности 1,0 значение THD должно быть равно нулю. Гармонические искажения могут вызвать серьезные проблемы, такие как повреждение кабелей и другого оборудования в электрической сети, а также риск перегрева и возгорания, высокие напряжения и блуждающие токи, неисправности оборудования и отказы отдельных компонентов и так далее.
Корректировка коэффициента мощности
Коррекция коэффициента мощности (PFC) используется, чтобы избежать гармоник входного тока, тем самым сводя к минимуму помехи для других устройств, питающихся от того же источника. В Европе и Японии электрооборудование должно соответствовать стандарту IEC61000-3-2. Этот стандарт применяется к большинству электроприборов с потребляемой мощностью более 75 Вт (оборудование класса D). Он также определяет максимальную амплитуду линейных гармоник до 39-й гармоники включительно.
В Соединенных Штатах не существует стандартов для ограничения выбросов гармонического тока, генерируемого электрическим оборудованием, как в Европе (IEC6100-3-2). Однако инициатива под названием 80 PLUS пытается интегрировать более эффективные блоки питания, особенно для персональных компьютеров, серверов и ноутбуков.
80 PLUS сертифицирует более 80% энергоэффективности при 20%, 50% и 100% номинальной нагрузки. Чтобы соответствовать сертификации 80 PLUS, для блоков питания требуется значение коэффициента мощности 0,9 или выше при 100% нагрузке. Это означает, что блоки питания у которых мощность потерь достигает 20% или менее (в виде тепла при указанных уровнях нагрузки), приведут к снижению потребления электроэнергии и снижению счетов за нее. Иногда производителям, использующим блоки питания сертифицированные по стандарту 80 PLUS, предоставляются льготы.
Типы корректоров коэффициента мощности (PFC)
Для уменьшения гармонических искажений используются два типа корректоров коэффициента мощности: пассивный PFC и активный PFC.

Как следует из названия, пассивный корректор мощности использует пассивные компоненты для коррекции значений выходного тока и напряжения (например, катушки индуктивности и конденсаторы). Пассивный PFC способен поднять коэффициент мощности до 0,7-0,85. Вот наиболее распространенные типы пассивных корректоров мощности:
Входной LC фильтр: также называется П-фильтром, он удаляет нежелательные частоты из сигнала. Фильтр уменьшает содержание гармоник в текущем сигнале, следя за тем, чтобы частота среза фильтра была чуть выше основной частоты. В результате достигается оптимальное затухание гармоник (рисунок ниже).

Фильтр на схеме Valley-fill: данный тип корректора коэффициента мощности может использоваться в приложениях с низким энергопотреблением, где допускается высокое эффективное пульсирующее напряжение на выходе постоянного тока. Он часто используется в электронных балластных системах. Схема содержит два конденсатора и три диода. Два конденсатора заряжаются последовательно от пика линии до половины пикового напряжения линии. Когда напряжение линии падает ниже напряжения одного конденсатора, диоды мостового выпрямителя смещаются в обратном направлении, что не позволяет току течь. Затем диоды valley-fill переходят в проводящий режим, а конденсаторы подключаются параллельно для питания нагрузки. На рисунке ниже показан обычный контур valley-fill.

Пассивные методики корректировки коэффициента мощности обычно используют простой LC-фильтр с линейной частотой, чтобы увеличить угол проводимости тока и уменьшить гармонические составляющие входного тока диодно-конденсаторного выпрямителя. Благодаря своей простоте, пассивный LC-фильтр является высокоэффективным и недорогим PFC-решением, которое потенциально может соответствовать спецификациям IEC 61000-3-2 класса D в диапазоне малой мощности. Однако при более высоких уровнях мощности размер и вес пассивных компонентов становятся проблемой из-за наличия более тяжелых и объемных катушек индуктивности фильтра. Пассивные методы имеют определенные преимущества, такие как простота, надежность и прочность, нечувствительность к шуму и скачкам напряжения, отсутствие генерации электромагнитных помех (EMI) и отсутствие потерь при высокочастотном переключении.
Активные PFC используют схемы активной электроники, которые содержат такие устройства, как MOSFET, BJT и IGBT. Существует широкий спектр топологий для активных корректоров мощности, и разработчики электроники / источников питания могут создавать схемы с различными режимами работы и различными задачами по мере развития технологий. Вот два основных типа активных корректировщиков коэффициента мощности (PFC):
Boost PFC
Эта популярная реализация, которая также называется повышающим преобразователем, представляет собой преобразователь мощности с выходным напряжением постоянного тока, превышающим его входное напряжение постоянного тока. Этот класс импульсного источника питания (SMPS) содержит, по меньшей мере, два полупроводниковых переключателя и один элемент накопления энергии (конденсатор). Фильтры обычно добавляются к выходу преобразователя для уменьшения пульсации выходного напряжения. Поскольку мощность должна быть сохранена, выходной ток меньше, чем входной ток.
Практически все повышающие PFC используют стандартную микросхему контроллера для простоты конструкции, снижения сложности схемы и экономии затрат.

Когда переключатель (S) замкнут, выход индуктора соединен с землей, и на него подается напряжение (Vi). Ток индуктора увеличивается со скоростью, равной Vi / L. Однако при размыкании контакта напряжение на катушке индуктивности изменяется и становится равным VL-Vin. Ток, который протекал в индукторе, будет затухать со скоростью, равной (VL-Vi) / L.

Индуктор фильтра на входной стороне является основным преимуществом повышающих PFC, поскольку он допускает мало искаженные входные токи, которые предотвращают уменьшение значения коэффициента мощности. Недостатком этого подхода является то, что выходное напряжение всегда превышает пиковое входное напряжение. Кроме того, отсутствует ограничение тока во время перегрузки и короткого замыкания из-за прямой связи между линией и нагрузкой.
Buck PFC
Этот понижающий преобразователь напряжения и повышающий преобразователь тока работают по принципу накопления энергии в индуктивности. Существует переключающий элемент (силовой MOSFET транзистор или IGBT), который можно открывать или закрывать (схема выше).
Когда переключатель находится во включенном положении (то есть MOSFET транзистор находится во включенном состоянии), импульс тока течет к нагрузке, и энергия накапливается как в индуктивности (L), так и в конденсаторе (C), и ток не протекает через диод, как при обратном смещением. Когда переключатель находится в положении ВЫКЛ., Энергия, накопленная в катушке индуктивности, возвращается в цепь, и ток течет через нагрузку и диод. В какой-то момент, когда напряжение нагрузки начинает падать, заряд, хранящийся в конденсаторе, становится основным источником тока до тех пор, пока переключатель не будет снова включен.
Buck преобразователи могут быть очень эффективными (КПД в 95% или выше для интегральных схем).
Выводы
Корректоры коэффициента мощности значительно изменились из-за возросшего интереса к соблюдению стандартов, таких как IEC61000-3-2 (подавление гармоник), пределов электромагнитных помех и других. Они улучшились и стали более экономичными благодаря улучшенным интегральным контроллерам.
Основное различие между пассивной и активной корректировкой коэффициента мощности заключается в простом использовании пассивных компонентов по сравнению с использованием в основном активных компонентов с интегральными схемами контроллера. Оба могут добиться коррекции коэффициента мощности на разных уровнях. В зависимости от эффективности конструкции, стоимости и топологии они могут использоваться в самых разных приложениях.
Что такое корректор коэффициент мощности
В последние десятилетия количество электроники, используемой в домашних условиях, в офисах и на производстве, резко увеличилось, и в большинстве устройств применяются импульсные источники питания. Такие источники генерируют гармонические и нелинейные искажения тока, которые отрицательно влияют на проводку электросети и электроприборы, подключенные к ней. Это влияние выражается не только в разного рода помехах, сказывающихся на работе чувствительных устройств, но и в перегреве нейтральной линии. При протекании в нагрузках токов со значительными гармоническими составляющими, не совпадающими по фазе с напряжением, ток в нейтральном проводе (который при симметричной нагрузке, практически, равен нулю) может увеличится до критического значения.
Международная электротехническая комиссия (МЭК) и Европейская организация по стандартизации в электротехнике (CENELEC) приняли стандарты IEC555 и EN60555, устанавливающие ограничения на содержание гармоник во входном токе вторичных источников электропитания, электронных нагрузках люминесцентных ламп, драйверах двигателей постоянного тока и аналогичных приборах.
Коррекция коэффициента мощности
Типичный импульсный источник питания состоит из сетевого выпрямителя, сглаживающего конденсатора и преобразователя напряжения. Такой источник потребляет мощность только в те моменты, когда напряжение, подаваемое с выпрямителя на сглаживающий конденсатор, выше напряжения на нем (конденсаторе), что происходит в течение примерно четверти периода. В остальное время источник не потребляет мощности из сети, так как нагрузка питается от конденсатора. Это приводит к тому, что мощность отбирается нагрузкой только на пике напряжения, потребляемый ток имеет форму короткого импульса и содержит набор гармонических составляющих (см. рис. 1).

Вторичный источник питания, имеющий коррекцию коэффициента мощности, потребляет ток с малыми гармоническими искажениями, равномернее отбирает мощность от сети, имеет коэффициент амплитуды (отношение амплитудного значения тока к его среднеквадратичному значению) ниже, чем у некорректированного источника. Коррекция коэффициента мощности снижает среднеквадратическое значение потребляемого тока, что позволяет подключать к одному выводу электросети больше разных устройств, не создавая в ней перегрузок по току (см. рис. 2).

Основываясь на вышесказанном, выводим определение для коэффициента мощности:
Стоит заметить, что отношение (I1эфф)/(Iэфф(общ) ) есть косинус угла между векторами, соответствующими действующему значению общего тока и действующему значению его первой гармоники. Если обозначить этот угол q, то выражение для коэффициента мощности принимает вид: PF=cos j Ч cos q. Задача коррекции коэффициента мощности состоит в том, чтобы приблизить к нулю угол разности фаз j между напряжением и током, а также угол q гармонических искажений потребляемого тока (или, другими словами, максимально приблизить форму кривой тока к синусоиде и максимально компенсировать фазовый сдвиг).
Пассивная коррекция коэффициента мощности
Пассивный метод коррекции чаще всего применяется в недорогих малопотребляющих устройствах (где не предъявляется строгих требований к интенсивности младших гармоник тока). Пассивная коррекция позволяет достичь значения коэффициента мощности около 0,9. Это удобно в случае, когда источник питания уже разработан, остается только создать подходящий фильтр и включить его в схему на входе.
Активная коррекция коэффициента мощности
Активный корректор коэффициента мощности должен удовлетворять трем условиям:
2) Отбираемая от источника мощность должна оставаться постоянной даже в случае изменения напряжения сети. Это значит, что при снижении напряжения сети ток нагрузки должен быть увеличен, и наоборот.
3) Напряжение на выходе PFC-корректора не должно зависеть от величины нагрузки. При снижении напряжения на нагрузке должен быть увеличен ток через нее, и наоборот.

Стандартный корректор коэффициента мощности представляет собой AD/DC-преобразователь с широтно-импульсной (PWM) модуляцией. Модулятор управляет мощным (обычно MOSFET) ключом, который преобразует постоянное или выпрямленное сетевое напряжение в последовательность импульсов, после выпрямления которых на выходе получают постоянное напряжение.

Проектирование импульсного источника питания с активным ККМ. Эпизод I
Предисловие
В своей предыдущей статье я говорил, что продолжу рассказ о работе с датчиками тока на эффекте Холла. С того момента прошло не мало времени, выход продолжения затянулся, да и писать «скучную теорию» я не любитель, поэтому ждал практической задачи.
Еще одной причиной отсутствия статей была моя работа в одной «современной успешной IT-hardware-компании», сейчас наконец-то я ее покинул и окончательно пересел на фриланс, так что время для статьи появилось))
Недавно ко мне обратился мой старый наставник и просто очень хороший человек. Естественно я не мог отказать в помощи, а оказалось все достаточно просто — меня попросили сделать блок питания для КВ трансивера FT-450, который будет более стабильный в работе, особенно при пониженном входном напряжении, чем уже имеющийся Mean Well. Прошу заметить, я не говорю о том, что Mean Well плохая фирма, просто в данном случае нагрузка достаточно специфическая, а так продукция у них вполне себе хорошая.
Диагноз примерно такой:
— Заявлен выходной ток в 40А, на деле при потреблением в 30-35А (на передаче) блок уходит в защиту;
— Наблюдается сильный нагрев при длительной нагрузке;
— Совсем становится плохо, когда использует его на даче, где напряжение в сети 160-180В;
— Напряжение максимальное 13,2-13,4В, а хотелось бы 13,8-14В с возможностью подкрутить +-20%.
Особенностью данной статьи будет то, что проект продвигается вместе с ней. Я за него только засел и поэтому смогу рассказать обо всех этапах разработки: от ТЗ до готового прототипа. В таком формате статей с наскоку на гике я не нашел, обычно люди пишут уже проделав всю работу и забыв половину мелочей, которые часто несут в себе главный интерес. Так же эту статью я хочу написать доступным для новичков языком, поэтому местным гуру стоит чуточку проще относиться к «неакадемичности» моего слога.
Технические требования
Любой проект всегда начинается с технического задания и обсуждений. Обсуждения мы прошли, остается ТЗ. У меня проект не коммерческий, а так сказать open source, поэтому я не буду тратить большое количество времени и ограничусь перечнем технических требований.
Для чего это нужно? Те, кто работает в компаниях связанных с разработкой чего либо меня поймут — «без ТЗ проект не взлетает», но для людей не связанных с промышленной разработкой этот момент может быть не очевиден. Поэтому немного объясню…
В процессе разработки если вы не опираетесь на ТЗ, то с вероятностью около 100% уйдете от изначально желаемого результата. Например, вначале вы хотели получить 1000 Вт мощности блока питания, но не нашли трансформатор подходящий и поставили тот, что попался под руку. В результате железка стала на 700 Вт, а вы то планировали на 1000! Для любителя это не смертельно, он просто убьет кучу денег и времени, не получив результата. Для работодателя инженера же это финансовая катастрофа, просроченный проект, а для инженера часто просто пинок под зад на улицу. И таких нюансов будет море, по мимо трансформатора еще что-то не найдется, вам яблоко на голову упадет и вы решите добавить каких нибудь «светюлек» и так далее.
Как этого избежать? Именно для этого сумрачный советский гений придумал «ГОСТ 34. Разработка автоматизированной системы управления (АСУ)». Достаточно просто сделать как надо ТЗ по данному ГОСТу, которое займет 30-50 страниц и ваш проект на стадии идеи будет соответствовать конечному результату в виде железки, надо лишь идти по пунктам. Если написано «трансформатор на 1000 Вт», то вы ищите/добываете его именно на 1000Вт, а не на авось берет «чуть чуть поменьше». Я работал и в ВПК и в частных компаниях: первые молятся на адекватные ТЗ и тех. проекты, которые обычно выглядят как томик «Война и Мир», поэтому наши танки лучше всех. Вторые же забивают «на бестолковую порчу леса», поэтому гражданская электронная продукция на выходе в России в большинстве случаев — «гуано на ардуине».
И так, чтобы избежать «хлама» на выходе мы составим список технических требований, которыми должен обладать наш прототип. Пока он их не достиг — проект считается незавершенным. Вроде все просто.
Требования к импульсному блоку питания:
— Выходное напряжение с возможностью регулировки в пределах 10-15В DC;
— Входное напряжение сети: 160-255В AC;
— Ток вторичных цепей: 40А
— Наличие синфазного фильтра;
— Наличие корректора коэффициента мощности (ККМ);
— Косинус фи: не менее 0,9;
— Гальваническая развязка входа с выходом;
— Защита от КЗ во вторичной цепи;
— Время срабатывания защиты по току: не более 1 мс;
— Стабильность выходного напряжения: не хуже 0.1%;
— Температура силовых элементов устройства: не более 55 градусов при 100% нагрузке;
— Общий КПД устройства: не менее 90%;
— Наличие индикатора напряжения и тока.
Еще хотел бы отметить одну особенность проектируемого ИИП — он полностью аналоговый. Это было достаточно важным требованием, т.к. я последние годы в основном проектировал с использованием DSP процессоров в качестве управляющего «мозга», но это пугает «заказчика». Ибо на данный момент он проживает в 2500 км от меня и в случае поломки ремонт затянется на долго, поэтому необходимо сделать устройство с максимальной ремонтопригодностью. Заказчик человек опытный в аналоговой схемотехники и отремонтирует в случае проблем без каких либо пересылок, максимум придется позвонить да обсудить проблему.
Подытожим: когда я разработаю, изготовлю, а затем протестирую ИИП и получу в результате тестов ТТХ, которые как минимум не хуже описанных выше — можно будет считать, что проект успешен, блок можно отдавать владельцу, а самому радоваться еще одно успешной железке. Но это все далеко впереди…
Функциональная схема
Обычно я с начальством воевал на тему, что функциональные схемы для чайников и отказывался рисовать, но т.к. статья все таки предназначена для новичков в электронике и чтобы всем было интересно читать я все таки ее нарисую и распишу, что делает каждый блок. Да и при условии отсутствия полноценного ТЗ данная схема позволит мне не отклоняться в процессе работы от изначальной идеи.

Рисунок 1 — Функциональная схема ИИП
Теперь кратко пробегусь по каждому блоку, а более подробно данные решения разберем уже на этапе разработки схемотехники. И так сами модули:
1) Синфазный фильтр — он призван спасти сеть и бытовые приборы подключенные к ней от помех, которые генерирует наш блок питания. Не пугайтесь — любой импульсный блок питания их выдает, поэтому в 90% ИИП имеется фильтр синфазных помех. Так же он оберегает и наш блок от помех приходящих из сети. На эту тему недавно наткнулся на чью-то бакалаврскую работу, там достаточно понятно все расписано — статья. Автор диплома Куринков А.В., за что его сердечно поблагодарим, хоть один диплом бакалавра в этом мире станет полезен))
2) Дежурное питание «классическое» на микросхеме TOP227, схема скорее всего будет взята прямо из даташита с добавление гальванической развязки от сети через оптрон. Выход будет реализован в виде 2-х развязанных друг от друга обмоток с напряжением 15В и 1А каждая. Одна будет питать ШИМ контроллер корректора, вторая ШИМ контроллер полумоста.
3) Выпрямитель выполнен на диодном мосте. Изначально хотел применить синхронный на N-канальных Mosfet, но на таких напряжениях и при токе 3-4А это будет бесполезная трата ресурсов.
4) Активный корректор мощности — без него никуда как только речь идет о хорошем КПД, да и по требованиям законодательства применение ККМ обязательно. ККМ это по факту обычный бустерный преобразователь, который закроет 2 проблемы: низкое входное напряжение, т.к. на своем выходе он стабильно будет выдавать 380В и позволит равномерно отбирать мощность из сети. Микросхему применил весьма популярную, китайцы (и не только) любят ставить ее в сварочные инвертора в тех же целях — ICE2PCS01. Таить не буду — взял ее как проверенное временем решение, на ней собирал ККМ на 6 кВА для полуавтомата и проблем нет уже не первый год, надежность меня подкупает.
5) Непосредственно преобразователь напряжения реализован по топологии — «полумост», советую для знакомство с ней прочитать главу в книге Семенова «Силовая электроника: от простого к сложному». Контроллер полумоста реализован на «классической» как Чайковский микросхеме TL494: дешево, функционально, надежно, проверено временем — что еще требуется? Кто считает ее старой может обратить свой взор на что-то от Texas из серии UCC38xxx. В данном модуле реализована обратная связь по напряжению на TL431 + PC817, а так же защита по току на датчике на эффекте Холла — ACS758.
6) Силовой трансформатор я планирую реализовать на сердечнике компании Epcos типа ETD44/22/15 из материала N95. Возможно мой выбор изменится дальше, когда буду рассчитывать моточные данные и габаритную мощность.
7) Долго колебался между выбором типа выпрямителя на вторичной обмотке между сдвоенным диодом Шоттки и синхронным выпрямителем. Можно поставить сдвоенный диод Шоттки, но это P = 0,6В * 40А = 24 Вт в тепло, при мощности ИИП примерно в 650 Вт получается потеря в 4%! При использование в синхронном выпрямителе самых обычных IRF3205 с сопротивление канала тепла выделится P = 0,008 Ом * 40А * 40А = 12,8 Вт. Получается выигрываем в 2 раза или 2% кпд! Все было красиво, пока я не собрал на макете решение на IR11688S. К статическим потерям на канале добавились динамические потери на коммутацию, в итоге то на то и вышло. Емкость у полевиков на большие токи все таки большая. лечется это драйверами по типу HCPL3120, но это увеличение цены изделия и чрезмерное усложнение схемотехники. Собственно из этих соображений решено было поставить сдвоенный Шоттки и спать спокойно.
8) LC-контур на выходе, во-первых, уменьшит пульсации тока, во-вторых, позволит «срезать» все гармоники. Последняя проблема крайне актуальна при питании устройств работающих в радиочастотном диапазоне и имеющие в своем составе высокочастотные аналоговые цепи. У нас же речь идет от КВ трансивере, поэтому тут фильтр просто жизненно необходим, иначе помехи «пролезут» в эфир. В иделе тут еще можно поставить на выход линейный стабилизатор и получить минимальные пульсации в единицы мВ, но на деле скорость ОС позволит и без «кипятильника» получить пульсации напряжения в пределах 20-30 мВ, внутри трансивера критичные узлы запитываются через свои LDO, так что его избыточность очевидна.
Ну вот мы и пробежались по функционалу и это только начало)) Но ничего, дальше пойдет бодрее ибо начинается самая интересная часть — расчеты всего и вся!
Расчет силового трансформатора для полумостового преобразователя напряжения
Сейчас немного стоит подумать о конструктиве и топологии. Я планирую применять полевые транзисторы, а не IGBT, поэтому рабочую частоту можно выбрать побольше, пока задумываюсь о 100 или 125 кГц, такая же частота кстати будет и на ККМ. Повышение частоты позволит несколько уменьшить габариты трансформатора. С другой стороны задирать сильно частоту не хочу, т.к. применяю TL494 в качестве контроллера, после 150 кГц она себя уже не так хорошо показывает, да и динамические потери вырастут.
Исходя из таких вводных, посчитаем наш трансформатор. У меня есть в наличии несколько комплектов ETD44/22/15 и поэтому пока ориентируюсь на него, список исходных данных таков:
1) Материал N95;
2) Тип сердечника ETD44/22/15;
3) Рабочая частота — 100 кГц;
4) Выходное напряжение — 15В;
5) Выходной ток — 40А.
Для расчетов трансформаторов до 5 кВт использую программу «Старичка», она удобна и достаточно точно считает. После 5 кВт начинается магия, частоты растут для уменьшения габаритов, а плотности поля и тока достигают таких значений, что даже скин-эффект способен менять параметры чуть ли не в 2 раза, поэтому для больших мощностей применяю дедовский метод «с формулами и выводом карандашом на бумаге». Вписав в программку свои вводные данные был получен следующий результат:
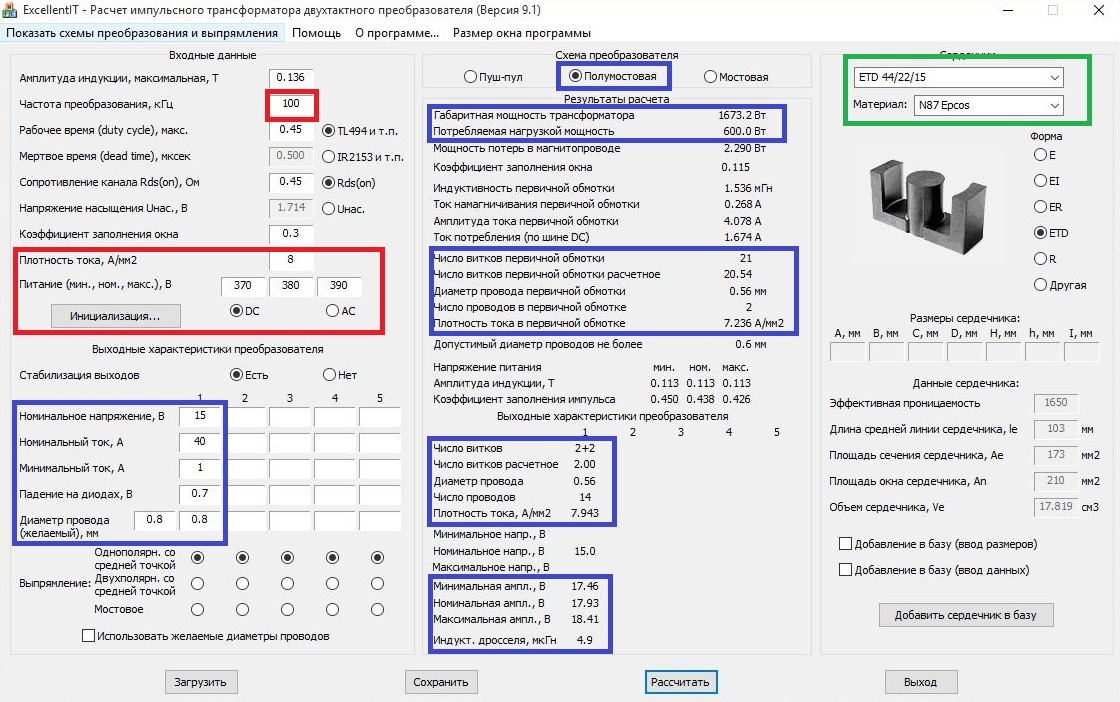
Рисунок 2 — Результат расчета трансформатора для полумоста
На рисунке с левой стороны отмечены вводные данные, их я описал выше. По центру фиолетовым цветом выделены результаты, которые нас больше всего интересуют, пробегусь кратко по ним:
1) Входное напряжение составляет 380В DC, оно стабилизированное, т.к. полумост питается с ККМ. Такое питание упрощает конструкцию многих узлов, т.к. пульсации токов минимальны и трансформатору не придется вытягивать напряжение при входном сетевом напряжение 140В.
2) Потребляемая (прокачиваемая через сердечник) мощность получилась 600 Вт, что в 2 раза меньше габаритной (той, которую сердечник может прокачать не уйдя в насыщение) мощности, а значит все хорошо. В программке не нашел материал N95, но на сайте Epcos в даташите подсмотрел, что N87 и N95 дадут очень похожие результаты, проверив на листочке выяснил, что разница в 50 Вт габаритной мощности — не страшная погрешность.
3) Данные по первичной обмотке: 21 виток мотаем в 2 провода диаметром 0.8 мм, думаю тут все понятно? Плотность тока около 8А/мм2, а это значит, что обмотки не будут перегреваться — все хорошо.
4) Данные по вторичной обмотке: мотаем 2 обмотки по 2 витка в каждой проводом так же 0.8 мм, но уже в 14 — все таки ток 40А! Далее соединяем начало одной обмотки и конец другой, как это сделать я объясню дальше, почему-то часто люди при сборке на этом моменте в ступор впадают. Тут тоже вроде магии никакой нету.
5) Индуктивность выходного дросселя — 4.9 мкГн, ток соответственно 40А. Нужен он, чтобы на выходе нашего блока не было огромных пульсаций ток, в процессе отладки я покажу на осциллографе работу с ним и без него, все станет ясно.
Расчет занял 5 минут, если у кого-то вопросы, то в комментариях или ЛС спрашивайте — подскажу. Чтобы не искали саму программу, предлагаю скачать ее с облака по ссылке. И моя огромная благодарность Старичку за его труд!
Следующим логичным этапом будет расчет выходного дросселя для полумоста, это как раз тот, что на 4.9 мкГн.
Расчет моточных параметров для выходного дросселя
Вводные данные мы получили в предыдущем пункте при расчет трансформатора, это:
1) Индуктивность — 4.9 мкГн;
2) Номинальный ток — 40А;
3) Амплитуда перед дросселем — 18В;
4) Напряжение после дросселя — 15В.
Используем так же программу от Старичка (все они есть в ссылке выше) и получаем следующие данные:
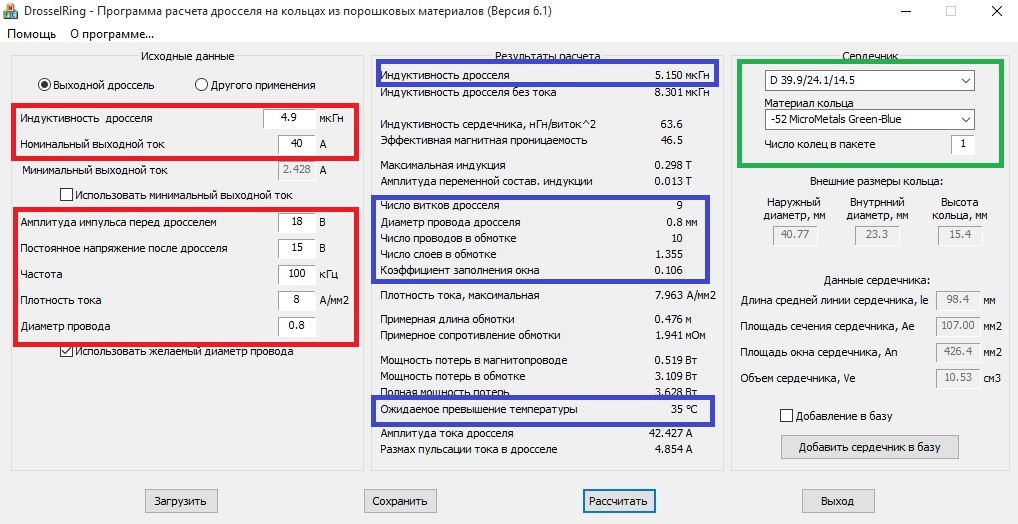
Рисунок 3 — Расчетные данные для намотки выходного дросселя
Теперь пробежимся по результатам:
2) Максимальная индукция, это значение которое нельзя превышать, иначе магнитное поле насытит сердечник и будет все очень плохо. Данный параметр зависит от материала и его габаритных размеров. Для современных сердечников из распыленного железа типовым значение является 0,5-0,55 Тл;
3) Намоточные данные: 9 витков мотаются косой из 10 жил провода диаметром 0.8 мм. Программка даже примерно указывает сколько слоев для этого понадобится. Я буду мотать в 9 жил, т.к. потом удобно будет разделить большую косу на 3 «косички» по 3 жилы и без проблем их распаять на плате;
4) Собственно само кольцо на котором буду мотать имеет размеры — 40/24/14.5 мм, его хватает с запасом. Материал №52, думаю многие видели в АТХ блоках кольца желто-голубого цвета, часто они используются в дросселях групповой стабилизации (ДГС).
Расчет трансформатора дежурного источника питания
На функциональной схеме видно, что я хочу использовать в качестве дежурного блока питания «классический» flayback на TOP227, от него будут запитываться все ШИМ контроллеры, индикацию и вентиляторы системы охлаждения. То, что вентиляторы будут запитываться от дежурки я понял только спустя какое-то время, поэтому данный момент на схеме не отображен, но ничего это же реалтайм разработка))
Скорректируем немного наши вводные данные, что же нам нужно:
1) Выходные обмотки для ШИМ: 15В 1А + 15В 1А;
2) Выходная обмотка самопитания: 15В 0.1А;
3) Выходная обмотка для охлаждения: 15В 1А.
Получаем необходимость в блоке питания с суммарной мощностью — 2*15Вт + 1.5Вт + 15Вт = 46.5 Вт. Это нормальная мощность для TOP227, я ее использую в мелких ИИП до 75 Вт для всяких зарядок АКБ, шуруповертов и прочего хлама, за много лет что странно еще ни один пока не сгорел.
Идем в другую программку Старичка и считаем трансформатор для flayback:
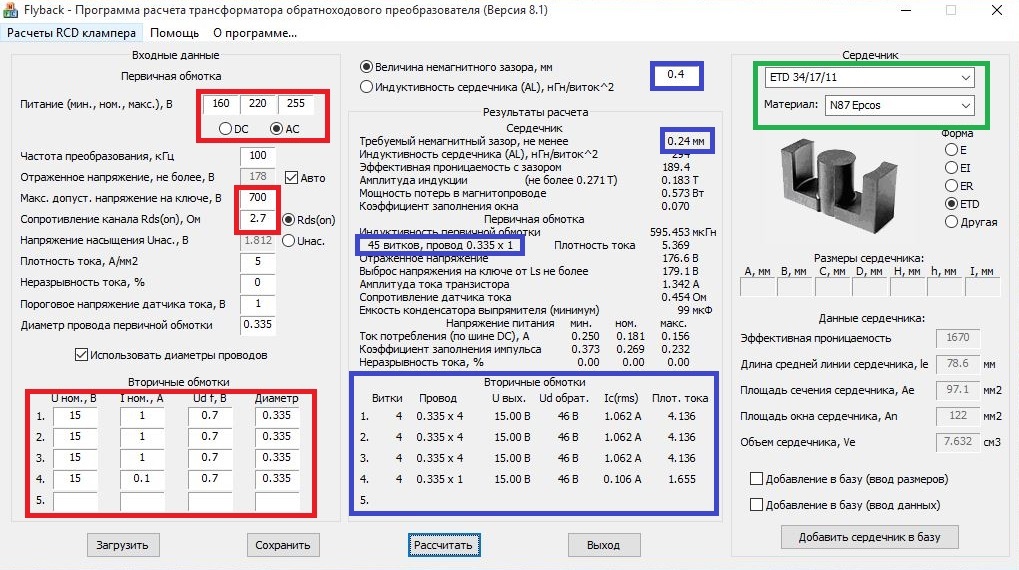
Рисунок 4 — Расчетные данные для трансформатора дежурного питания
1) Выбор сердечника обоснован просто — он у меня есть в количестве ящика и те самый 75 Вт он вытягивает)) Данные на сердечника тут. Он из материала N87 и имеет зазор 0.2 мм на каждой половинке или 0.4 мм так называемый полный зазор. Данный сердечник прямо предназначен для дросселей, а у обратноходовых преобразователей эта индуктивность именно дроссель, но не буду пока в дебри влезать. Если в трансформаторе полумоста зазора не было, то для обратноходового преобразователя он обязателен иначе как и любой дроссель он просто уйдет в насыщение без зазора.
2) Данные о ключе 700В «сток-исток» и 2.7 Ом сопротивления канала, взяты из даташита на TOP227, у данного контроллера силовой ключ встроен в саму микросхему.
3) Входного напряжение минимальное взял чуть с запасом — 160В, это сделано для того, чтобы в случае выключения самого блока питания в работе осталась дежурка и индикация, они сообщат о аварийно низком напряжении питания.
4) Первичная обмотка у нас представляет из себя 45 витков проводом 0.335 мм в одну жилу. Вторичные обмотки силовые по 4 витка и 4 жилы проводом 0.335 мм (диаметр), обмотка самопитания обладает такими же параметрами, поэтому все тоже самое, только 1 жила, ибо ток на порядок ниже.
Расчет силового дросселя активного корректора мощности
Думаю самый интересный участок данного проекта именно корректор коэффициента мощности, т.к. по ним достаточно мало информации в интернете, а рабочих и описанных схем еще меньше.
Выбираем программку для расчета — PFC_ring (PFC это по-басурмански ККМ), вводные используем следующие:
1) Входное напряжение питания — 140 — 265В;
2) Номинальная мощность — 600 Вт;
3) Выходное напряжение — 380В DC;
4) Рабочая частота — 100 кГц, обусловлена выбором ШИМ контроллера.
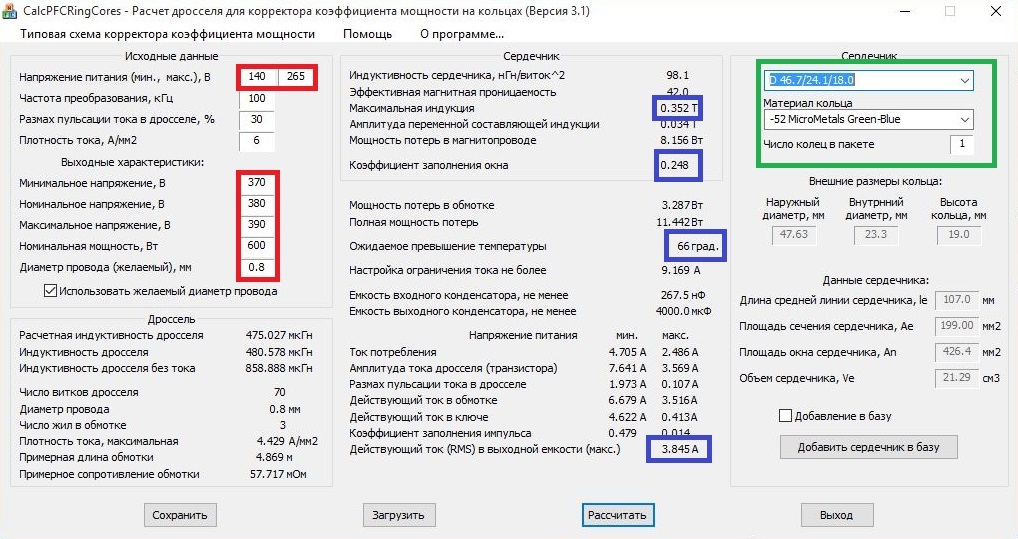
Рисунок 5 — Расчет силового дросселя активного ККМ
1) Слева как обычно вводим исходные данные, установив 140В минимальным порогом мы получаем блок, который сможет работать при напряжение сети 140В, так мы получаем «встроенный стабилизатор напряжения»;
2) Сердечник выбрал — К46/24/18. По расчетам впритык влезало и на кольцо диаметром 39 мм, но там получалось 110 витков — мотать сложно будет в кучу слоев, да и запас по индукции в ККМ весьма кстати, в итоге получает 0.35 Тл при допустимых 0.5 Тл;
3) Многих пугает такая надпись: «Емкость выходного конденсатора» 4000 мкФ! Те, кто в теме ужаснутся такой цифре, это 15 огромных и дорогих кондеров (300-350р/шт), но не пугайтесь — это цифра бесполезна для нас и ориентироваться на нее нельзя, Старичок наверное в расчетах или лишний ноль где-то дописал, или речь идет о конденсаторах к огромным ESR и надо 15 штук параллелить. Для нас есть параметр более грамотный — «Действующий ток в выходной емкости» 3.845А. 1 хороший электролит от Epcos со своим низким внутренним ESR способен отдавать 3-4А. Я перестрахуюсь и поставлю 2 штуки параллельно, чтобы уменьшить ESR и получить минимум 6А с ног кондеров.
Существуют специальные пленочные конденсаторы, они способны отдавать огромные токи, а их ESR измеряется в единицах мили Ом! Да, у них меньшие емкости 10-50 мкФ, но 1 такой конденсатор заменяет батарею из нескольких огромных электролитов алюминиевых, а самое главное работает на больших частотах, тогда как «классически» электролит после 200 кГц превращается в резистор и просто греет планету.
Выглядят они вот так. Как видите ценник очень даже преятный на фоне тех же электролитов, так что советую использовать именно их. У меня их просто нету в наличии, а digikey только после праздников отправит.
Схемотехника активного корректора коэффициента мощности и входных цепей
Вот и подошли на верное к самому интересному пункту — схемотехника. Начну разумеется по порядку: от входа к выходу. Думаю те, кто разбирал любой импульсный блок питания видел скопление конденсаторов (чаще синего цвета) и дроссель сразу около разъема подключения вводного кабеля, этот модуль называется как раз — фильтр синфазных помех.
Что такое синфазные помехи и зачем с ними бороться можно нагуглить без проблем, я же лишь вкратце объясню. Синфазные помехи — это все помехи, блуждающие между проводниками тока и землей. Они приходят к нам из сети питания, да и наш блок питания так же излучает их в определенном виде, чтобы избавиться от них — мы и ставим фильтр.
Методика расчета есть во многих источниках, так же советую посмотреть книги Семенова: первую (3.3) и вторую (3.2). Я же предпочитаю задачи связанные с ЭМИ моделировать в CST Suite Studio и «методом подбора» получать наиболее оптимальные параметры. К тому же данный фильтр в отличии от LC фильтра низкой частоты не требует высокой точности, поэтому для 90% ИИП вы можете использовать данные приведенные в моем схематике.
Для управления ККМом я решил применить микросхему — ICE2PCS01GXUMA1. Она позволяет построить достаточно простой и надежный преобразователь, как уже было написано АККМ — это ни что иное как booster.
Рисунок 6 — Схема входных цепей и активного ККМ
Немного о схемотехнике… В современном мире трудно что-то изобрести — это факт. Можно сделать классную железку, но с вероятностью 99,99% ее уже кто-то делал, но возможно просто в более плохом исполнение. Все это касается и электроники, можно месяцами сидеть и изобретать схемы и в итоге окажется, что ее придумали лет так 10 назад. Это ни в коем случае не повод перестать изобретать! Это лишь повод получше поискать информацию. Я использую микросхему, которую производит гигант индустрии — Infineon Technologies. Поэтому с большой вероятностью они предусмотрели для своего контроллера некую отладочную плату, поэтому я сразу пошел на digikey.com, где обычно закупаюсь, и вбил название своего камня — по мимо возможности купить микросхему поисковик на сайте мне выдал одну отладку (Evaluation Board) — EVALPFC2-ICE2PCS01. Купить ее уже нельзя, только у производителя под заказ, но мне и не надо. Зато тут есть документация на готовое рабочее решение с открытой схемой, трассировкой платы и списком компонентов! Вот оно готовое решение, ничего не надо придумывать, производитель сделал все, чтобы его продукцию покупали, а для разработчиков практически всегда на первом месте в требованиях к элементам стоит доступность документации и только потом цена. Есть только одно «НО» — отладочная плата на 300Вт, а мне надо 700, но не страшно — сама архитектура это уже 90% работы, пересчитать номиналы это дело 15 минут, и так поехали:
1) Силовой дроссель L5 я пересчитал и данные для его намотки отображены на рисунке 5. Мы получили, что вместо индуктивности в 1240 мкГн понадобится значение в 480 мкГн, правда и значение тока выросло в 2,5 раза;
2) Диоды VD11,12 должны быть на напряжение не менее выходного, то есть 400В и выше, а так же должны выдерживать импульсное значение тока в устройстве. Еще одним важнейшим параметром является время обратного восстановления, т.к. мой корректор работает на частоте в 100 кГц и обычный диод просто не будет успевать. Для данной задачи подойдут импульсные или ultrafast диоды. Я применил диоды VS-HFA16TB120-N3 на 1200В и 16А с временем восстановления всего 30 мкс, т.к. они соответствую всем параметрам, выпускаются в удобном для охлаждения корпусе TO-220-2 и стоят не дорого около 2-2,5$;
3) Транзистор VT1 должен быть не менее чем с 1,5 запасом по напряжению «сток-исток» и выдерживать импульсное значение тока (х2 от номинального). Учитывая частоту лучше применить N-канальный Mosfet, тем более в последние пару лет они стали очень доступны по цене. Я применил ключ на 800В, т.к. выбросы могут достигать 1,5й амплитуды (около 550В) и запас дополнительный лишним не бывает. Ток у данного ключа 11А и что важно он изготавливается в корпусе TO-247, а значит его очень легко охлаждать и изолировать от радиатора;
4) Выходные конденсаторы C18,19 являются важным узлом, т.к. у нас преобразователь однотактный и именно они сглаживают пульсации тока. Конденсатор должен быть желательно на 450В чтобы иметь запас по напряжению и способен отдавать до 8А тока на пиковых нагрузках. В спойлере выше я писал про конденсаторы, хороший электролит способен отдавать 3-4А мгновенного тока и он ограничивается исключительно ESR конденсатора. Чтобы получить необходимые 8А я решил уменьшить ESR за счет параллельного включения 2-х конденсаторов, каждый на 470 мкФ и 450В. Такая «батарея» способна отдать 11А, т.к. применил кондесаторы весьма хорошие от Epcos из линейки Low ESR;
5) Еще стоит пересчитать датчик тока в виде шунта, в даташите эта тема полностью раскрыта в виде целого раздела.
Узел дежурного питания ИИП
Немного по гальванической развязке, решение у меня тут немного своеобразное, объясню почему так и не иначе:
1) «Первичка и вторичка развязаны» — сделал для того, чтобы в случае пробоя TOP227 «мозги» не сгорели и ремонт ограничится лишь в замене самой микросхемы;
2) «Вторичные обмотки между собой не развязаны» — а зачем? У меня все модули управления объединены общей землей. Конечно можно озадачиться и развязать «мозги» ККМа, полумоста и индикации, но это актуально, когда цена управляющих цепей очень высока и составляют 20-30% от стоимости самого устройства. Такое бывает если для управления применяю DSP или какой-то МК motor control, в моем же случае TL-ка за 15 рублей и IR2110 не стоят таких затрат как оптическая развязка или развязка на трансформаторах — сложность такого решения сильно возрастет вместе с ценником;
3) «Если вторички гальванически связаны, то зачем делать их аж 3 штуки, когда можно сделать 1 штуку на 3А?» — я художник и я так вижу сделано это ради просто удобства: удорожание копеечное, а разводить ПП и искать дефекты при ремонте будет намного проще. Ведь каждая цепь питания целый, логически завершенный блок на схеме.
Теперь сама схемотехника, как я и предполагал — особо не удалялся от даташита на TOP227, из «изысков» добавил дроссели на вторичных обмотках ради уменьшения пульсаций тока, добавлена индикация светодиодная на каждый канал. Снаббер применил RC-шный, т.к. супрессор почему-то не успевал за выбросами, хотя должен. Да и я не сторонник использования супрессоров, ну не нравятся они мне просто после того, как пару раз намучился с ними. Еще «камень в их огород» — не работают на большой частоте, современная база позволяет проектировать обратноходовые преобразователи на частотах 1-1,5 МГц и там они нужны как козе баян.
Еще один момент — питание для дежурки я взял после синфазного фильтра, но до диодного моста. Да, мне пришлось поставить еще один диодный мост за 0.2$, но зато я сэкономил около 3$ на еще одном синфазнике — профит!
Рисунок 7 — Схема дежурного блока питания для цепей управления ИИП
Я упоминал, что данную статью в первую очередь пишу для новичков и тех, кто хочет познать джедайскую мощь схемотехники, поэтому покажу откуда взялись номиналы всех компонентов в данном модуле, ведь часто открыв даташит мы обнаруживаем, что далеко не все компоненты можно посчитать по имеющимся формулам, т.к. производители делают документацию для подготовленных инженеров, а не новичков и любители — о этот жестокий мир!
1) VD4 – напряжение его должно быть не менее, чем: UМ = 265В * 1.41 = 374В. Откуда взялись эти цифры: «265В» – максимальное напряжение работы ИИП равно 255В и 10В в запас, «1.41» — это множитель, что пересчитать переменное напряжение до диодного моста в постоянное напряжение после него.
Номинальный ток не менее: I = P/(µ * UВХ) = (15В * 1А * 3 + 15В * 0,1А) / (140В * 0,85) = 0,39А. Тут лучше взять хотя бы с двойным запасом, т.к. в момент включения будет заряжаться конденсатор и будет пик тока достаточно большой. Теперь по цифрам: «15В и 1А» – это наши обмотки, «140В» – это минимальное напряжение на входе нашего БП. Почему минимальное? А потому, что в данном случае будет максимальный ток – рассматривать всегда надо худшие условия, чтобы ничего не взрывалось. «0,85» — это КПД нашего преобразователя, как показывает практика — это среднее значение для данной микросхемы, и оно даже оговорено в даташите.
2) R1 и C13 – считаются в программе Старичка там же где и трансформатор, в левом верхнем углу «RCD-снаббер».
3) VD8 – берется исходя из соображений, что максимальное напряжение не меньше, чем у встроенного в микросхему силового ключа, в моем случае это не менее 700В. Ток не менее тока потребления схемой, то есть требования к диоду: >700В и >0.4А, у FR207 значения 1000В и 2А – все подходит.
5) С6-С11 – минимальная емкость выходного конденсатора указана на рисунке 4, в однотактных преобразователях именно он уменьшает пульсации тока, отдавая энергию. У меня получилось 99 мкФ – на деле работать будет, но пульсации будут около 1-2В. Это опять же опыт, либо считать руками. Чтобы не портить бумагу можно смоделировать выходную цепь в MicroCap. Я поставил суммарную емкость в 660 мкФ, этого более чем достаточно для получения пульсаций в пределах 100 мВ.
6) L2-L4 – индуктивности моделируются так же в MicroCap, самый простой способ и точный. А так можно ставить с индуктивностью от 2.2 до 10 мкГн без каких-либо опасений, будет работать достойно. Ток дросселя должен быть не менее, чем номинальный, то есть 1А. Я применил дроссели с индуктивностью 10 мкГн и током 1.1А от Epcos.
7) R3 – тут все по закону Ома: R = (UП — UД) / IС = (15,3В – 2,6В) / 0,008А = 1570 Ом – ближайший номинал 1,5 кОм. «15,3В» — это напряжение на выходе от которого питается светодиод оптрона. «2,6В» — падение на светодиоде (в даташите берется). «0.008А или 8 мА» — ток, который мы направим в оптрон, вообще можно до 20 мА, но смысла нет и 1-10 мА вполне достаточно – дольше проживет.
8) R6 и R8 – образуют делитель напряжения, который собственно задает напряжение на выходе. Оно считается так: UВЫХ = UREF * (1+R2/R8) = 2,56В * (1+100/20) = 2,56В * 6 = 15,36В – отлично же! «UREF = 2,56В» — это напряжение при котором пробивает «программируемый стабилитрон» TL431, то есть при достижении напряжения 2,56В на управляющей ноге 2 стабилитрон открывается и подает «землю» с ноги 3 на ногу 1 и соответственно на анод светодиода оптрон. Так TOP227 узнает, что хватит качать энергию. Сами номиналы резисторов подбираются так, чтобы при деление выходного напряжения (которое мы хотим) получалось ровно 2,56В.
9) R2, R4, R7 – токоограничивающие резисторы на светодиодах, я не хочу светить ими в полный накал, поэтому подавать буду не 12-15 мА, которые они хотят по даташиту, а всего 5 мА иначе они слепят не плохо так. Опять прибегаем к закону Ому: R = (UП — UД) / IС = (15,3В – 2,6В) / 0,005А = 2540 Ом – ближайший номинал 2,4 кОм.
Схемотехника преобразователя напряжения по топологии «полумост»
Задача данного модуля преобразовать напряжение с ККМ с номиналом 380В в необходимое выходное 15В. Полумост я выбрал исходя из уменьшенного количества компонентов на фоне полного моста, а так же достаточно высокого значения КПД. С резонансником я заморачиваться не стал, габариты мне не критичны, а выигрыш в 1-2% не стоит таких усилий.
Устройство построено по распространенной схеме: «ШИМ контроллер (TL494) + драйвер полумоста (IR2110S) + 2 х N-канальных Mosfet-ах + диод Шоттки в выходном выпрямителе», поэтому ничего сверхнового тут не будет, единственное я добавил защиту по току на Холловском датчике тока ACS758, т.к. ток достаточно большой и измерять его хочется по возможности точнее — оборудование целее будет.
Рисунок 8 — Схема полумостового преобразователя напряжения
Теперь пробегусь по компонентам, чтобы читателю, желающему повторить данное устройство, было понятно откуда что берется и как пересчитать номиналы под собственную задачу:
1) Один из основных параметров для ШИМ контроллера — это частота встроенного генератора. Рабочая частота для двухтактного блока питания будет составлять 1/2 от частоты генератора. Задается данный параметр с помощью RC-цепочки, на схеме это R37-C43. Формула для расчета частоты генератора приведена в даташите и выглядит следующим образом: fosc = 1,1 / (RT * CT). Рабочая частота у меня 100 кГц, значит расчетная частота для генератора должна быть вдвое больше — 200 кГц. Считаем: пусть С43 имеет емкость 2.2 нФ, тогда RT = 1,1 / (200 000 Гц * 0,0000022 Ф) = 2500 Ом — беру ближайший номинал 2.4 кОм;
2) Обратная связь по току реализована на встроенном, в ШИМ-контроллер, компараторе. При токе 40А согласно даташиту на ACS758-50B будет напряжение: UВЫХ = UVCC + Iизм*0,04В/А = (5В / 2) + (40А * 0,04В/А) = 2,5В + 1,6В = 4,1В. Чтобы компаратор выдал ошибку в видел лог.1 и ШИМ-контроллер понял, что пора уменьшить скважность ШИМа, неоходимо сигнал с датчика подавать на положительный вход ОУ, а на инверсный надо подать опорное напряжение значение 4.1В. У TL494 есть встроенный источник опорного напряжения (ИОН) на 5В, необходимо сделать делитель напряжения с коэф. деления равному: 5В / 4.1В = 1.22. Данный делитель реализован на R27-R26, я подобрал номиналы 2 и 10 кОм, коэф. деления будет равен 1,2В и на инверсном входе компаратора будет опорное напряжение, равное: UОП = UREF / (1+R27 / R26) = 5В / (1 + 2/10) = 4,16В — это значение соответствует току в 41.3А. Так и оставляем;
3) Обратная связь по напряжению «классическая», сильно рассказывать о ней не будут. Выходное напряжение через делитель поступает на TL431 с напряжением открытия 2,56В. Как только напряжение достигает нужного значения TL431 подключает светодиод оптрона к земле и он загорается, подавая +5В на положительный вход встроенного ОУ (их аж 2 штуки у TL494). Когда оптрон закрыт вход через резистор R30 подтянут к земле и компаратор выдает лог.0. На инверсный вход через делитель подается 1/2 UREF равное 2.5В, поэтому при закрытом оптроне на прямом входе 0В и выход ОУ равен 0, когда оптрон открыт, то на прямом входе 5В, что больше 2.5В и на выходе ОУ устанавливается 1, сообщая об ошибке;
4) C25, 26 — конденсаторы создают «среднюю точку», конденсаторы применяются с рабочим напряжением 200-250В. Я поставил конденсаторы от Epcos на 220 мкФ и 250В;
5) VT2, 3 — полевые транзисторы, такие же как в ККМ. Напряжение «сток-исток» с большим запасом, реально там не будет более 200В + выбросы 50-100В. Такой запас позволяет отказаться от снабберных цепей. Ток в ключах будет: IVT = PВЫХ / UДЕЛ = 600 Вт / (380В / 2) = 600 Вт / 190В = 3,15А. Наши ключи на 11А, так что даже пиковые кратковременные перегрузки не навредят преобразователю;
6) Выходной дроссель L6 мы уже рассчитывали и результаты приведены на рисунке 3.
Схемотехника силовой части и управления достаточно стандартные, если вдруг у вас остались вопросы, то смело спрашивайте в комментариях или в личных сообщениях. По возможности постараюсь всем ответить и объяснить.
Дизайн печатной платы импульсного блока питания
Вот я и добрался до этапа, который остается для многих чем-то сакральным — дизайн/разработка/трассировка печатной платы. Почему предпочитаю именно термин «дизайн»? Он ближе к сущности данной операции, для меня «разводка» платы всегда процесс творческий как у художника написание картины, да и людям из других стран будет проще понять чем вы занимаетесь.
Сам процесс проектирования платы не содержит в себе каких либо подводных камней, они содержатся в том устройстве для которого она предназначена. На деле силовая электроника не выдвигает какое-то дикое количество правил и требований на фоне того же СВЧ аналога или скоростных цифровых шин данных.
Я перечислю основные требования и правила касающиеся именно силовой схемотехники, это позволит реализовать 99% любительских конструкций. О нюансах и «хитростях» рассказывать не буду — каждый должен сам набить себе шишек, получить опыт и уже оперировать им. И так поехали:
1) Ширина проводников — чем они шире, тем лучше. Причин для этого несколько. Во-первых, увеличивая данный параметр мы снижаем паразитную индуктивность проводников, а значит помех, наводок и прочих гадостей в управляющем сигнале будет меньше. Во-вторых, мы сможем пропускать больший ток, т.к. сечение проводника будет больше. В-третьих, увеличивая площадь поверхности проводника мы увеличиваем количество тепла и интенсивность с которой оно отдается, а значит и охлаждать такие проводники намного проще и можно позволить себе большую плотность тока;
Часто люди не задумываются о данном параметре и мне приходилось встречать, где силовая часть выполнена проводниками 0.6 мм при 80% площади платы просто пустующей. Зачем так делать для меня лично загадка.
В моей железке все по проще, 50 А/мм 2 цифра вполне себе адекватная, при толщине меди в 35 мкм полигоны без проблем обеспечат нужное сечение. Остальное же было для общего развития и понимания вопроса.
2) Длина проводников — в данном пункте нету необходимости равнять линии с точностью до 0,1 мм как это делают, например, при «разводке» шины данных DDR3. Хотя все равно крайне желательно делать длину сигнальных линий примерно равно длины. Достаточно будет и +-30% длины, главное не делать HIN в 10 раз длиннее, чем LIN. Это необходимо, чтобы фронты сигналов не смещались относительно друг друга, ведь даже на частоте всего в сотню килогерц разница в 5-10 раз может вызвать сквозной ток в ключах. Особенно это актуально при малом значение «мертвого времени», даже при 3% у TL494 это актуально;
3) Зазор между проводниками — он необходим для уменьшения токов утечки, особенно это касается проводников, где протекает ВЧ сигнал (ШИМ), ведь поле в проводниках возникает сильно и ВЧ сигнал за счет скин-эффекта стремится вырваться как на поверхность проводника, так и за его пределы. Обычно достаточно зазора в 2-3 мм;
4) Зазор гальванической развязки — это зазор между гальванически развязанными участками платы, обычно требование на пробой около 5 кВ. Чтобы пробить 1 мм воздуха надо около 1-1,2 кВ, но у нас пробой возможен не только по воздуху, но и по текстолиту и маске. В заводских условиях используются материалы проходящие электротестирование и можно спать спокойно. Поэтому основная проблема воздух и из вышеописанных условий можно сделать вывод, что достаточно будет около 5-6 мм зазора. В основном разделение полигонов под трансформатором, т.к. он является основным средством гальванической развязки.
Теперь перейдем непосредственно к дизайну платы, я не буду в данной статье рассказывать ну супер подробно, да и вообще писать целую книгу текста желания не много. Если наберется большая группа желающих (в конце опрос сделаю), то просто сниму видеоролики по «разводке» данного устройства, это будет и быстрее и информативнее.
Этапы создания печатной платы:
1) Первым делом необходимо определиться с примерными габаритами устройства. Если у вас есть уже готовый корпус, то вы должны измерить посадочное место в нем и отталкиваться в размерах платы именно от него. Я же планирую корпус сделать на заказ из алюминия или латуни, поэтому буду стараться сделать максимально компактное устройство без потери качества и ТТХ.
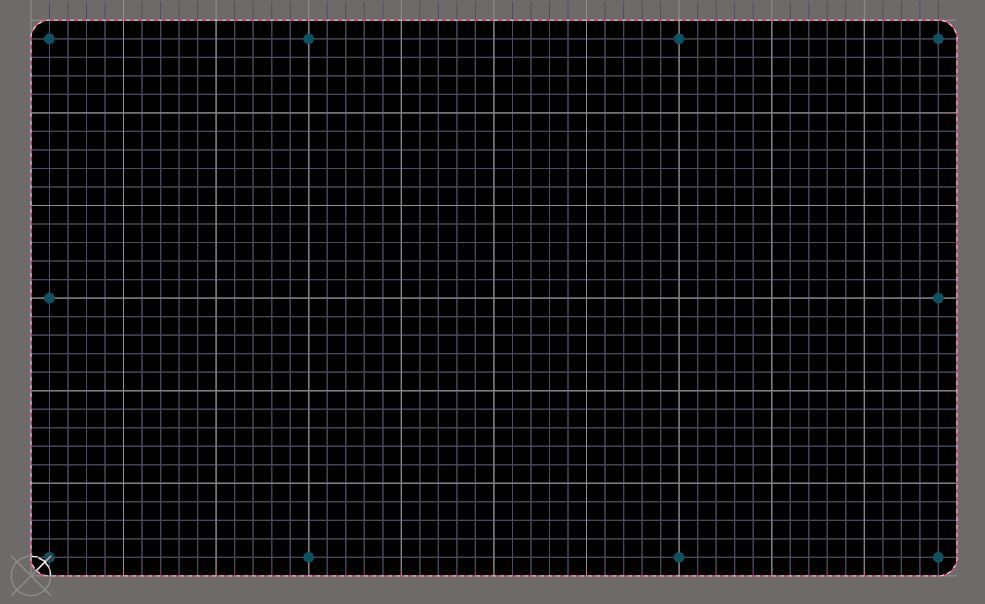
Рисунок 9 — Создаем заготовку будущей платы
Запомните — габариты платы должны быть кратны 1 мм! Или хотя бы 0.5 мм, иначе вы еще вспомните мое завещание Ленина, когда будете собирать все в панели и делать заготовку на производство, а конструкторы, которые будут создавать по вашей плате корпус засыпят вас проклятиями. Не надо создавать плату с размерами аля «208,625 мм» без крайней необходимости!
P.S. спасибо тов. Лунькову за то, что он все таки донес мне эту светлую мысль))
Тут я сделал 4 операции:
а) Сделал саму плату с габаритными размерами 250х150 мм. Пока это примерный размер, дальше думаю ужмется ощутимо;
б) Закруглил углы, т.к. в процессе доставки и сборку острые убьются и сомнутся + плата приятнее выглядит;
в) Разместил крепежные отверстия, не металлизированные, с диаметром отверстия 3 мм под стандартный крепеж и стойки;
г) Создал класс «NPTH», в который определил все не металлизированные отверстия и создал для него правило, создающие зазор 0.4 мм между всеми другими компонентами и компонентами класса. Это технологическое требование «Резонита» для стандартного класса точности (4-й).
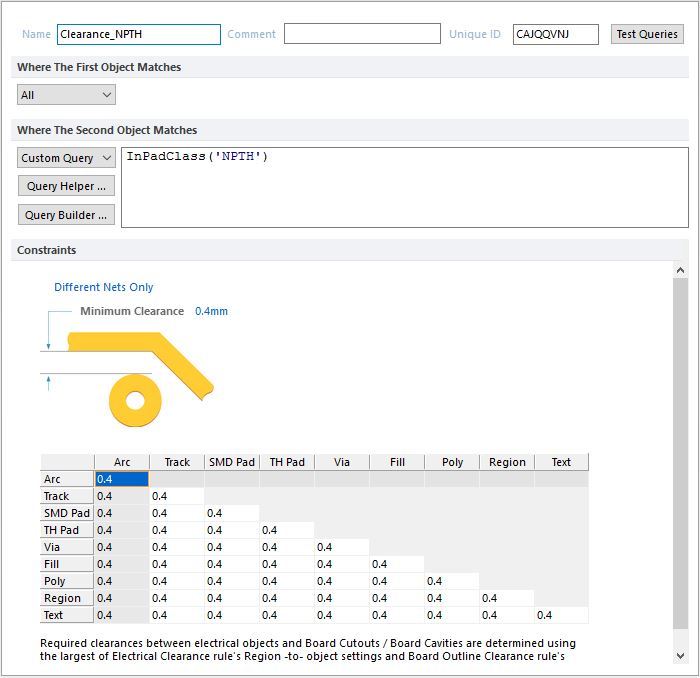
Рисунок 10 — Создание правила для не металлизированных отверстий
2) Следующим этапом необходимо сделать расстановку компонентов с учетом всех требований, она должна быть уже сильно приближена к конечному варианту, т.к. побольше части сейчас определятся финальные габариты платы и ее форм-фактор.
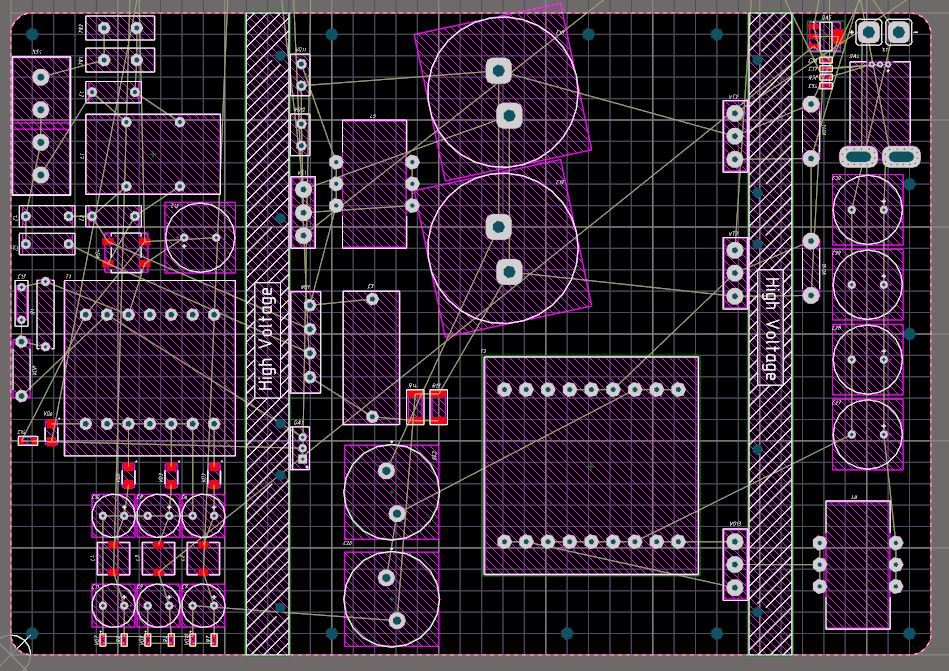
Рисунок 11 — Выполнена первичная расстановка компонентов
Установил основные компоненты, они уже с большой вероятностью не будут перемещаться, а следовательно габаритные размеры платы окончательно определены — 220 х 150 мм. Свободное место на плате оставлено не просто так, там будут размещены модули управления и прочие мелкие SMD компоненты. Для удешевления платы и удобства монтажа все компоненты будут только на верхнем слое, соответственно и слой шелкографии только один.
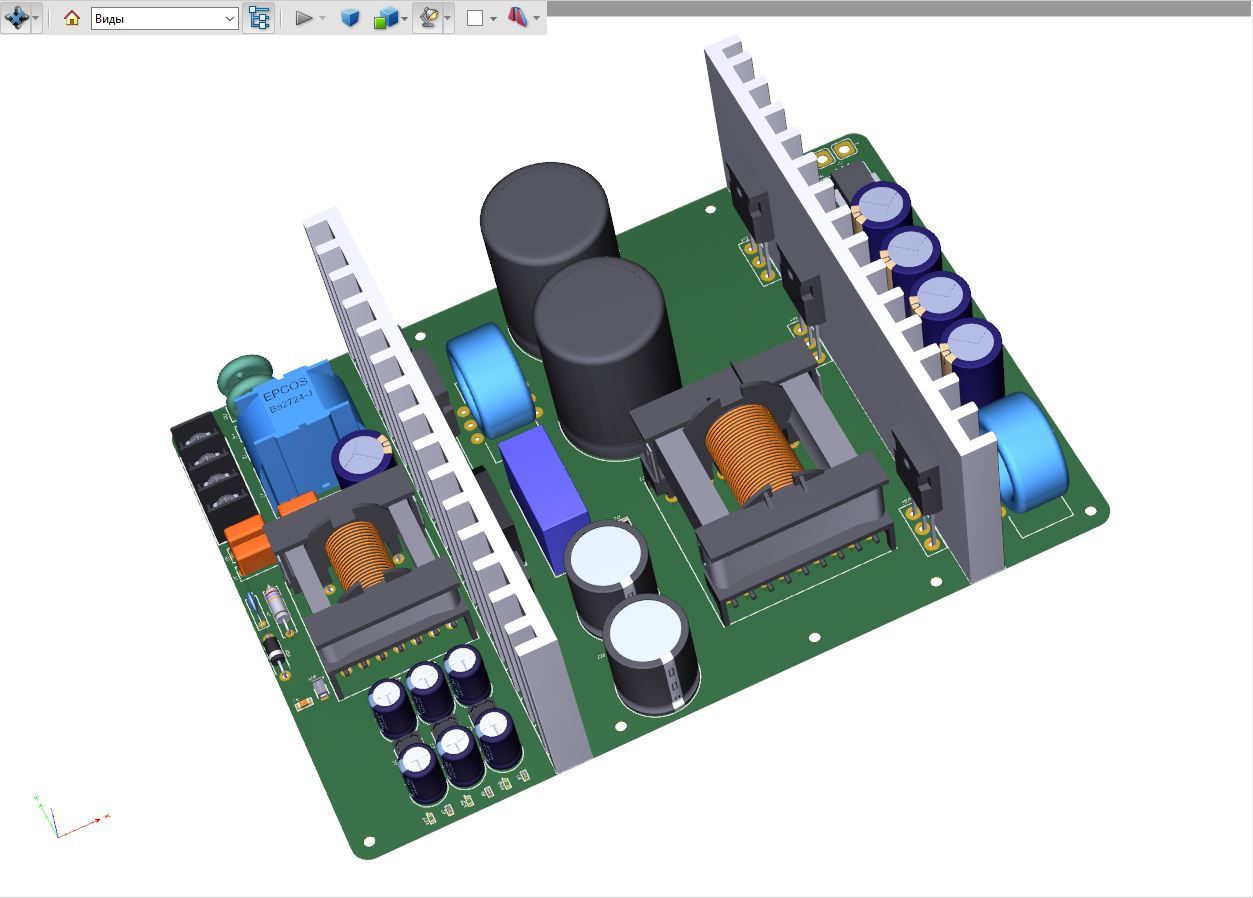
Рисунок 13 — 3D вид платы после расстановки компонентов
3) Теперь, определив расположение и общую структуру расставляем оставшиеся компоненты и «разводим» плату. Дизайн платы можно выполнить двумя способами: в ручную и с помощью автотрассировщика, предварительно описав его действия парой десятков правил. Оба способа хороши, но данную плату сделаю все таки руками, т.к. компонентов мало и особых требований по выравниваю линий и целостности сигналов тут нет и не должно быть. Так будет определенно быстрее, автотрассировка хороша, когда много компонентов (от 500 и далее) и основная часть схемы цифровая. Хотя если кому-то будет интересно, то могу показать как «разводить» платы автоматически за 2 минуты. Правда перед этим надо будет весь день писать правила, хех.
После 3-4х часов «колдунства» (половину времени отрисовывал модели недостающие) с температурой и чашечкой чая я наконец-то развел плату. Я даже не задумывался от экономии места, многие скажу, что габариты можно было ужать на 20-30% и будут правы. У меня штучный экземпляр и тратить свое время, которое явно дороже 1 дм 2 за двухслойную плату, было просто жалко. Кстати о цене платы — при заказе в «Резонит»-е, 1 дм 2 двухслойной платы стандартного класса, обходится примерно в 180-200 рублей, так что много тут не сэкономить если у вас конечно не партия в 500+ штук. Исходя из этого, могу посоветовать — не извращайтесь с уменьшением площади, если 4 класс и не требований к габаритам. И вот что получилось на выходе:
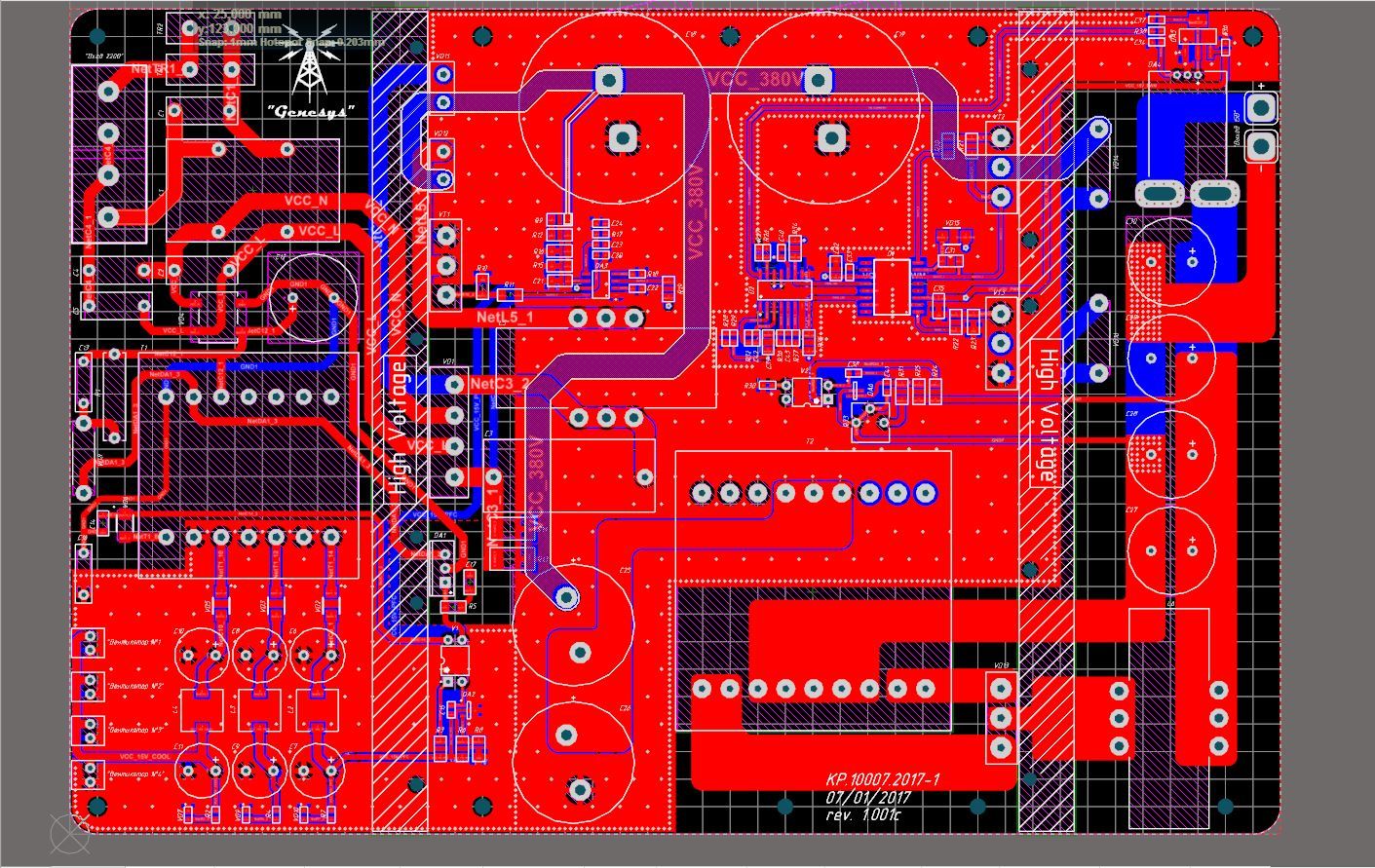
Рисунок 14 — Дизайн платы для импульсного блока питания
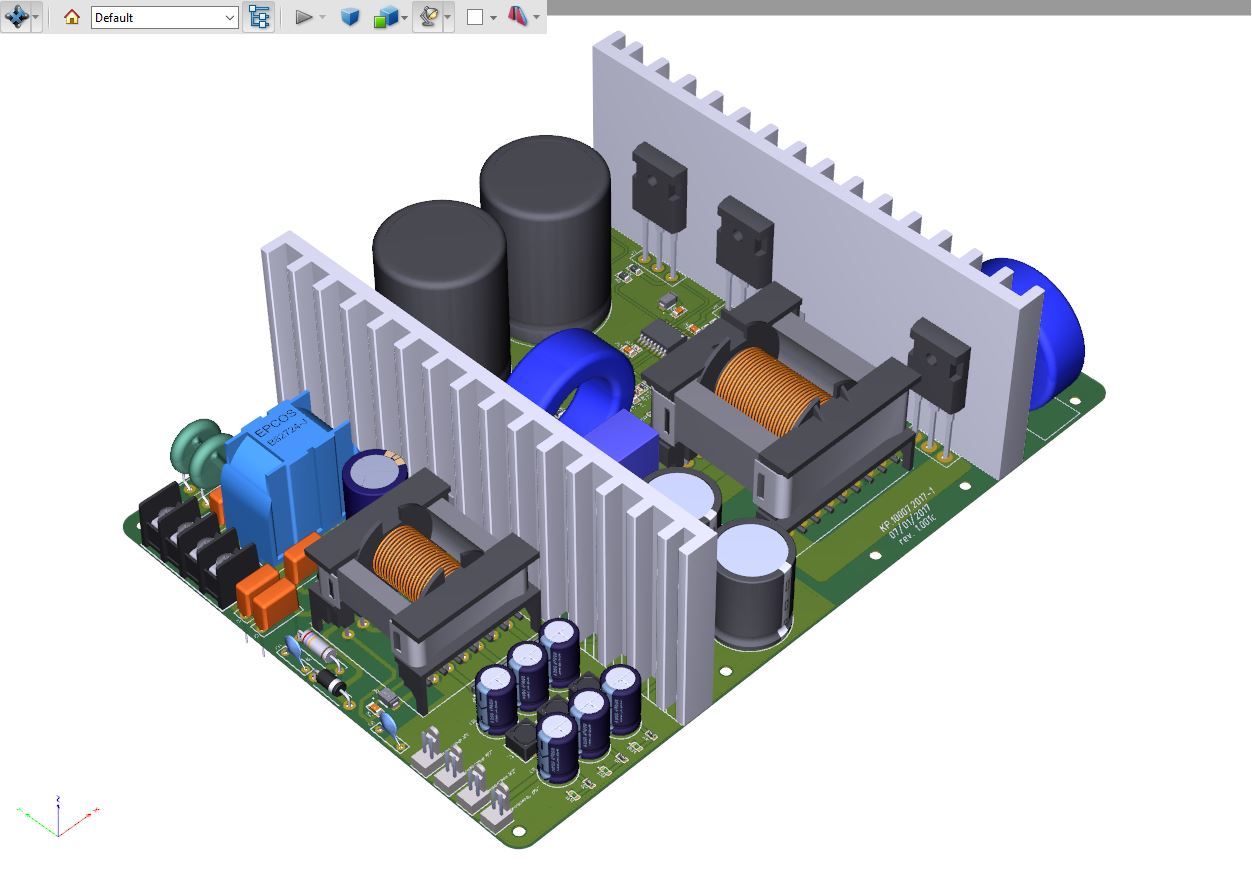
Рисунок 15 — Трехмерный вид на получившиеся устройство
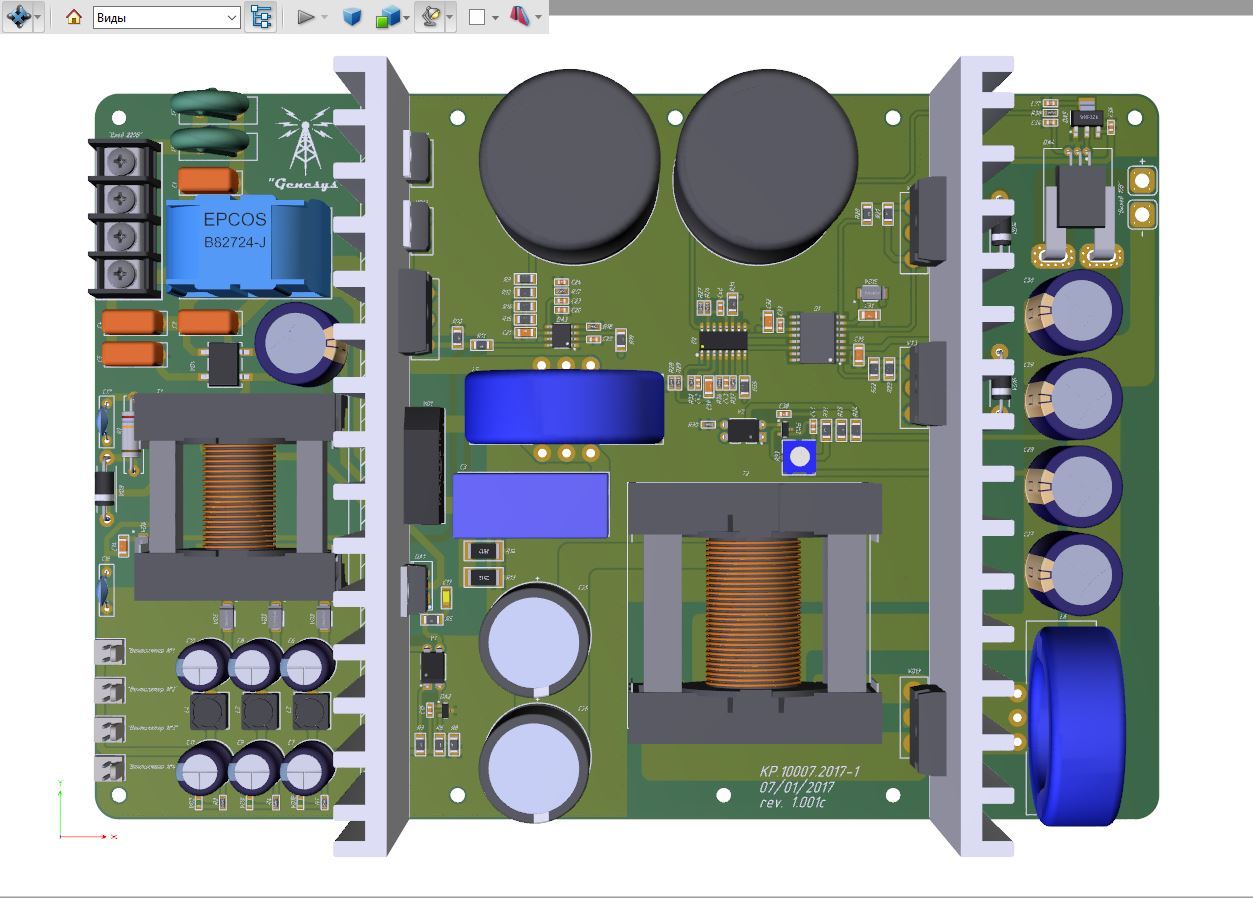
Рисунок 16 — Трехмерный вид на устройство (вид сверху)
Теперь документация готова. Сейчас необходимо сформировать необходимый пакет файлов для заказа компонентов, у меня все настройки уже прописаны в Altium-е, поэтому выгружается все одной кнопкой. Нам необходимы Gerber-файлы и файл NC Drill, в первом хранится информация о слоях, во втором координаты сверловки. Посмотреть файлик для выгрузки документации можно будет в конце статьи в проекте, выглядит это все примерно так:
Рисунок 17 — Формирования пакета документации для заказа печатных плат
После того, как файлы готовы можно заказывать платы. Конкретных производителей рекомендовать не буду, наверняка есть лучше и дешевле именно для прототипов. Все платы стандартного класса 2,4,6 слоев я заказываю в Резоните, там же 2 и 4-х слойный платы 5-го класса. Платы 5 класса, где 6-24 слоя в Китае (например, pcbway), а вот платы HDI и 5-го класса с 24 и более слоями уже только на Тайване, все таки качество к Китае еще хромает, а где не хромает ценник уже не такой приятный. Это все касается прототипов!
Следуя своим убеждениям я иду в Резонит, ох сколько они нервов потрепали и крови выпили… но в последнее время вроде исправились и начали более адекватно работать, хоть и с пинками. Заказы я формирую через личный кабинет, вводите данные о плате, подгружаете файлы и отправляете. Личный кабинет у них мне нравится, цену кстати тут же считает и можно меняя параметры добиться лучше цены без потери качества.
Например, сейчас я хотел плату на текстолите 2 мм с медью 35 мкм, но оказалось, что такой вариант в 2,5 раза дороже чем вариант с 1,5 мм текстолитом и 35 мкм — поэтому выбрал последний. Для увеличения жесткости платы я добавил дополнительные отверстия под стойки — проблема решена, цена оптимизирована. Кстати, если бы плата шла в серию, то где-то на 100 штуках эта разница в 2,5 раза пропала и цены сравнялись, ибо тогда нестандартный лист закупали под нас и потратили без остатков.
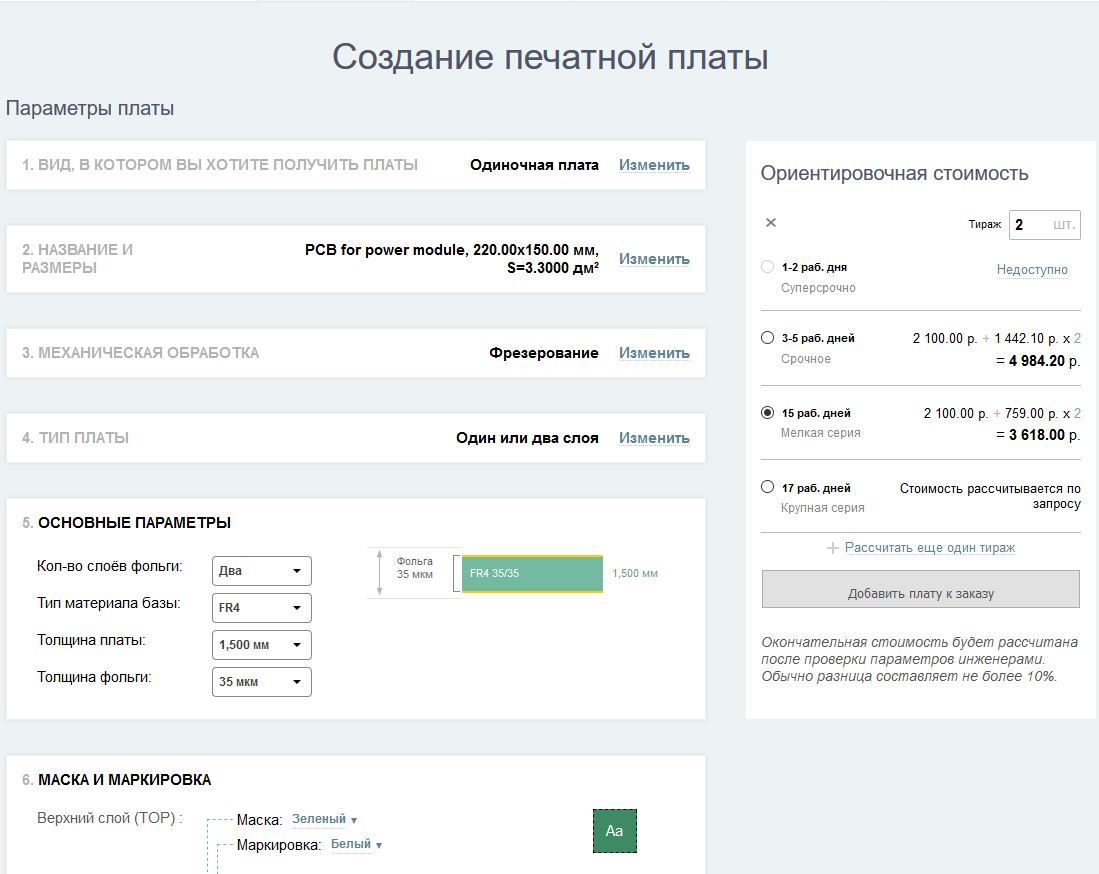
Рисунок 18 — Финальный вид расчета стоимости плат
Эпилог
Ну вот я и подошел к логическому завершению статьи — получение схемотехники, дизайна платы и заказ плат на производстве. Всего же будет 2 части, первая перед вами, а во второй буду рассказывать как я проводил монтаж, сборку и отладку устройства.
Как и обещал делюсь исходниками проекта и прочими продуктами деятельности:
1) Исходник проекта в Altium Designer 16 — тут;
2) Файлы для заказа печатных плат — тут. Вдруг вы захотите повторить и заказать, например, в Китае, этого архива более чем достаточно;
3) Схема устройства в pdf — тут. Для тех, кто с телефона или для ознакомления не хочет тратить время на установку Altium (качество высокое);
4) Опять же для тех, кто не хочет ставить тяжеловесный софт, но интересно покрутить железку выкладываю 3D модель в pdf — тут. Для просмотра надо обязательно скачать файл, когда откроете в правом верхнем углу жмем «доверять документу только один раз», дальше тыкаем в центр файла и белый экран превращается в модельку.
Так же хочется поинтересоваться мнение читателей… Сейчас платы заказаны, компоненты тоже — по факту есть 2 недели, о чем написать статью? По мимо таких «мутантов» как эта иногда хочется наваять что-то миниатюрное, но полезное, несколько вариантов я представил в опросах, либо предлагайте свой вариант наверное в личку, чтобы не засорять комментарии.