Принцип работы инкрементального энкодера

Описание работы инкрементального энкодера, квадратура выходных сигналов, особенности механического сопряжения, особенности оптической и магнитной технологии.
Что такое инкрементальный энкодер?
Импульсный (пошаговый) энкодеротносится к типу энкодеров, которые предназначены для указания направления движения и/или углового перемещения внешнего механизма. Пошаговый (также именуемый инкрементный или инкрементальный) энкодер формирует импульсы, количество которых соответствует повороту вала на определенный угол. Этот тип энкодеров, в отличие от абсолютных, не формирует код положения вала, когда вал находится в покое.
Пошаговый энкодер связан со счетным устройством, это необходимо для подсчета импульсов и преобразования их в меру перемещения вала.
Конструкция инкрементального энкодера
Инкрементальный энкодер (он же пошаговый энкодер) состоит из следующих компонентов: источника света, диска с метками, фототранзисторной сборки и схемы обработки сигнала. Диск пошагового энкодера подразделен на точно позиционированные отметки. Количество отметок определяет количество импульсов за один оборот. К примеру, если диск поделен на 1000 меток, тогда за 250 импульсов вал должен повернуться на 90 градусов.
Технология (оптическая и магнитная)
В настоящее время широко распространены две технологии исполнения — оптическая и магнитная.
1. В оптическом энкодере первичным датчиком сигнала является оптический диск (как на картинке выше). Количество черных/прозрачных секторов на диске определяет разрешение оптического инкрементального энкодера, также именуемое как количество меток в обороте.
2. В настоящее время становятся очень популярными магнитные энкодеры. В магнитном энкодере сигнал положения вала формируется датчиком Холла. Данная технология открывает новые возможности, например, программируемое количество импульсов в обороте, причем некоторые производители энкодеров предоставляют такую возможность (программирования) самому Заказчику, что значительно облегчает подбор энкодера для своей конкретной задачи. Так, например, стало простой задачей заменить в оборудовании вышедший из строя энкодер с «экзотическим» числом импульсов в обороте, например, 1234 вместо более привычных 1024. В оптическом энкодере такое разрешение, как упоминалось выше, возможно только при «физическом» наличии нанесенных на диск меток.
Квадратура выхода (выходы А и В)
Максимальная частота ответа
Максимальная частота ответа является частотой, при которой вращающийся энкодер может дать электрический ответ. Такая частота имеет отношение к количеству выходных импульсов, на которые энкодер реагирует в секунду. Следовательно, энкодер пошагового типа должен удовлетворить следующее отношение:
(rpm/60) x (разрешение) ≤ максимальной частоты ответа.
Указатель нулевой отметки / импульс полного оборота (выход N)
В энкодере, имеющем этот выход, импульс на этом выходе появляется в каждом обороте вала. Функция показателя нуля может использоваться для сброса внешне связанного счетчика или для регистрации начальной (нулевой) позиции.
Функция оповещения Light reserve warning
Опциональная функция оповещения о снижении интенсивности (старении) светодиода подсветки считывающей матрицы энкодера.
В таких энкодерах имеется специальный выход (ножка разъема) именуемая «Light reserve warning» (в англ. документации) или «Frühwarnausgang» (в нем. документации). При снижении яркости свечения до критического уровня (когда возникает вероятность сбоя в работе энкодера) на этом выходе появляется предупреждающий положительный потенциал (например, +5V). Это позволяет своевременно принять меры и подумать о замене энкодера. Однако эта опция очень редко используется клиентами. К тому же параметры долговечности / стабильности светоизлучения светодиодов последние годы значительно улучшились в связи с чем данная опция вообще потеряла актуальность и практически больше не предлагается производителями энкодеров.
Разрешение
— это количество выходных импульсов за вращение вала.
Соединительный вал

Для механического соединения вала датчика с внешним механизмом следует использовать специальный гибкий соединитель (эластичную муфту), который предназначен для компенсации возможного биения валов, как в радиальном, так и в осевом направлении. Это позволяет резко снизить вероятность преждевременного износа подшипников вала датчика. Уже незначительный, возникший в осевом направлении вала, люфт может привести к полному электрическому отказу энкодера. Это связано с тем, что для достижения высокого разрешения, оптический диск и считывающая матрица располагаются в непосредственной близости друг от друга и минимальное осевое биение вала может привести к их механическому контакту, что в последствии приведет к разрушению нанесенных на диск меток.
Сопутствующие товары и статьи
Кодировка наименования инкрементального энкодера Wachendorff
Принцип формирования заказного кода в зависимости от требований к уровню и формату сигналов на выходе и др. параметров заказываемого энкодера Wachendorff.

Инкрементальные энкодеры с полым валом
Инкрементальные энкодеры с полым валом, отличающиеся высокой надежностью, высоким классом защиты, широким диапазоном рабочих температур, простотой монтажа, а также высоким, до 25000 импульсов на оборот, разрешением.

Аксессуары для энкодеров вращения и линейного перемещения
Соединительные эластичные муфты, переходники, фланцы, мерные колеса, специальные монтажные компоненты и пр. аксессуары для абсолютных и инкрементных энкодеров..

Инкрементальные энкодеры с цельным валом
Инкрементальные энкодеры с цельным валом, отличающиеся высокой устойчивостью к механическими нагрузками и воздействиям окружающей среды, разнообразием исполнений кабелей и разъемов для их подключения, а также высоким, до 25000 импульсов на один оборот, разрешением.

Инкрементальные магнитные энкодеры IXARC
Инкрементальные магнитные энкодеры IXARC с любым количеством импульсов в диапазоне разрешения до 16384 имп./оборот.
| Инкрементальный или абсолютный датчик положения? |
_reg.jpg) |
Даррен Крейт (Darran Kreit), Zettlex, для Automation.com
Большинство инженеров при решении задач определения положения по-прежнему используют инкрементальные датчики положения. Отчасти это происходит из-за преобладающего убеждения в том, что абсолютные датчики положения слишком сложны и дорогостоящи. В данной статье описываются оба подхода и относительные преимущества каждого из них.
Понимание разницы между инкрементальными и абсолютными техниками измерения, порой, оказывается нетривиальной задачей. Помимо необходимости разбираться в терминологии, связанной с определением положения, инженерам приходится иметь дело с порой противоречивыми заявлениями от производителей, которые, нет-нет, да и заявят, что тот или иной продукт является абсолютным датчиком положения – хотя, на самом деле, он инкрементальный.
В этой статье мы используем термин «датчик» как собирательный для энкодеров, преобразователей и детекторов.
Определения: инкрементальный и абсолютный
Основной особенностью инкрементального датчика положения является то, что он сообщает о величине изменения положения. Другими словами, после того, как на датчик подается питание, он не сможет сообщить о положении до тех пор, пока ему не дадут точку отсчета.
Некоторые производители датчиков заявляют об «абсолютном» функционале своих продуктов, на том основании, что аккумуляторная батарея позволяет хранить информацию о положении, когда питание инкрементального датчика отключается или пропадает. Но, что произойдет, когда батарея будет разряжена?
Другие производители заявляют об «абсолютном» функционале своих инкрементальных датчиков, потому, что им надо совсем немного энергии, для того, чтобы получить точку отсчета. Все равно, это – инкрементальные датчики, хотя их и продают как абсолютные – с соответствующими ценами.
Потенциометры: проблемы износа и надежности
Хотя основанные на потенциометрах датчики положения все еще являются самым обыкновенным их типом, за последние 30 лет значительное распространение получили бесконтактные датчики. Этот тренд порожден проблемами, связанными с износом и надежностью потенциометров – особенно в жестких условиях (прежде всего связанных с вибрацией) или при долгих сроках службы.
Почти все потенциометры являются абсолютными, однако обычной формой бесконтактных датчиков являются оптические энкодеры. Их принцип работы основан на использовании луча света, направленного сквозь или на специальную решетку. Положение вычисляется исходя из интенсивности отраженного или преломленного света. Большинство оптических устройств являются инкрементальными. Положение определяется с помощью серии так называемых А/В импульсов. Также есть канал Z, дающий один импульс на оборот, в качестве референса.
Абсолютные оптические устройства схожи, но используют другой тип шкалы, где абсолютная позиция определяется при подключении питания – без необходимости в точке отсчета. Как правило, у этих датчиков цифровой выход, и разрешение определяется количеством битов в выходном сигнале. 10-битные устройства могут предоставить 1024 отсчета, 11-битные – 2048 отсчетов и т.д.
Сейчас продается в три раза больше инкрементальных датчиков, чем абсолютных. Основная причина – инкрементальные датчики, как правило, дешевле абсолютных, при сравнимых характеристиках.
Однако, сегодня абсолютные датчики не так дороги, как многие продолжают считать. Переход к (бесконтактным) абсолютным изменениям положения может существенно улучшить производительность, повысить точность и снизить общие расходы. Это связано с тем, что с инкрементальными датчиками связан ряд технических проблем.
Самая очевидная заключается в том, что каждый раз при отключении питания понадобится калибровка – это замедляет производственные процессы, а также может иметь последствия, связанные с безопасностью, если питание пропало неожиданно.
Во-вторых, положение определяется с помощью точки отсчета. В некоторых случаях особенно при изменении напряжения или быстрых изменениях положения – могут произойти нарушения в процессе отсчета. Это может иметь разрушительное воздействие на производственный процесс, причем, это будет обнаружено не сразу (например, рассинхронизация производственных операций). Большинство инкрементальных датчиков являются оптическими, и для получения данных с большим разрешением, характеристики оптических элементов, прежде всего, решетки, должны быть очень высоки: ее период должен измеряться буквально в пределах микронов. Хотя это повышает чувствительность, однако, означает и повышенную уязвимость к внешним факторам – влага, жир, грязь могут остановить работу, или, что хуже, сделать показания неверными.
Разница в цене между абсолютными и инкрементальными датчиками сокращается, частично из-за постепенного распространения абсолютных датчиков, и, главное – из-за внедрения новых технологий для абсолютных датчиков. Конечно, оптические датчики по-прежнему остаются «устройствами выбора» для большинства инженеров, однако индукционные устройства нового поколения позволяют создавать точные абсолютные датчики положения, устойчивые к жестким условиям внешней среды.
Вместо решетки и оптического сенсора, в этих индуктивных датчиках положения используются плоские, печатные катушки индуктивности, чьи основные принципы функционирования напоминают таковые, к примеру, у датчиков угла поворота. С помощью этих катушек можно создавать компактные, легкие, абсолютные датчики с высоким разрешением, не зависящие от сложных оптических устройств. Эти датчики действительно абсолютные, и обладают большими преимуществами по сравнению с оптическими. Во-первых, на них не воздействуют загрязнения или влага. Во-вторых, на их измерительные способности, как правило, не влияют смещения или недостаточно точный монтаж. А это означает, что этим датчикам не нужно сверхточное крепление, и их очень просто крепить к частям механизмов. Это радикально упрощает автоматизацию, уменьшает размеры и вес конструкции. В общем и целом, индуктивные абсолютные датчики положения позволяют решать задачи определения положения с расходами, сравнимыми с традиционными инкрементальными датчиками.
Инкрементальные энкодеры


Инкрементальные энкодеры: принцип работы
Инкрементальные энкодеры применяются на серводвигателях в качестве устройства обратной связи для определения положения и направления вращения вала. Кроме того контроллеры двигателей могут использовать данные от энкодеров для расчета скорости и ее контроля. Инкрементальный энкодер является критическим компонентом, который передает важные данные необходимые для автоматического управления различными системами движения от автономных транспортных средств до торговых автоматов.
Двухканальный инкрементальный энкодер на выходе имеет два сигнала, которые обычно обозначаются как канал А и канал В. Данные сигналы называются квадратурными, потому что между ними существует смещение фазы в 90 градусов (см. рис.1)
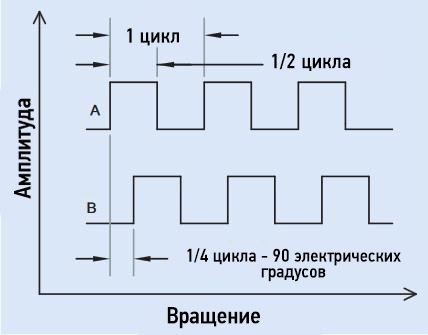
Рис.1
Разработчики могут использовать эту разницу фаз для определения направления вращения. В случае вращения в одном направлении сигнал в канале А изменяется от низкого уровня к высокому раньше чем в канале В, то есть канал А ведет канал В. При вращении в противоположном направлении канал В ведет канал А. Направление вращения серводвигателя определяется при помощи датчиков установленных на валу двигателя (см. рис.2 ниже).
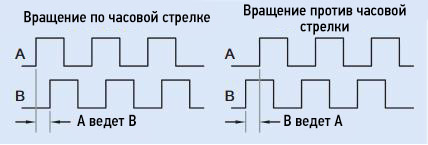
Рис. 2 Использование сигналов каналов А и В для определения вращения
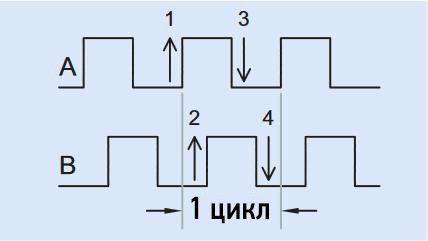
Рис. 3
Трехканальный инкрементальный энкодер состоит из каналов А и В, и дополнительного опорного канала, обозначаемого как индекс. Индексный канал генерирует один отсчет на оборот при прохождении вала определенного положения. Импульс индексного канала может быть стробированным или не стробированным. Фронты не стробированного импульса индексного канала не совпадают с фронтами импульсов в каналах А и В. Фронты стробированного импульса индексного канала будут совпадать с высоким или низким уровнем в одном или обоих каналах А и В. Обычно используют стробированный канал индекс, который совпадает с сигналом в каналах А и В. См. рис.4
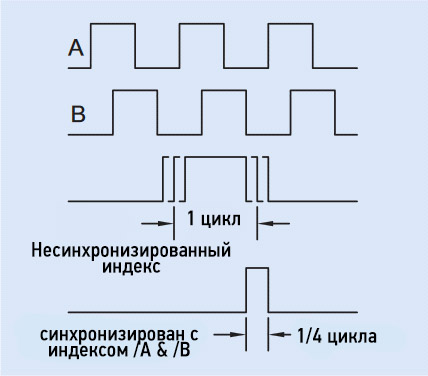
Рис. 4. Временная диаграмма трехканального инкрементального энкодера с сравнением синхронизированного и не синхронизированного импульса в индексном канале.
Индексный сигнал обычно используется для определения центрального положения, исходного положения точки обнуления или нулевой отметки. Он часто используется в сочетании с некоторым типом датчика приближения, который обеспечивает определение приближения к начальному положению. Все три выхода энкодера: А, В и индекс могут быть как с несимметричными, так и с симметричными выходами. Несимметричный выход сравнивается с сигналом земля (GND) источника питания энкодера. Подобный энкодер требует только одного провода для каждого канала плюс два провода к источнику питания (показаны на рис. 5). Несимметричные выходы энкодера, как правило, TTL совместимы, для их подключения желательно использовать как можно более короткие проводники, чтобы минимизировать ухудшение сигнала и проблемы с электрическими помехами. Энкодер с одним несимметричным выходом может быть экономичным решением для ОЕМ производителей.
Выходы дифференциальной линии драйвера более невосприимчивы к электрическим помехам, чем сигналы несимметричных линий, потому дифференциальные линии могут быть большей длины. Эти выходы являются комплементарными сигнальными парами, когда сигнал имеет высокий уровень, а другой низкий, как это показано на рисунке 6. Каждый дифференциальный выход требует двух проводов; обычно используют витые пары для увеличения помехоустойчивости. Драйверы дифференциальной линии имеют низкий импеданс, что делает устойчивыми к помехам. Они должны быть подключены к высокоимпедансными дифференциальным приемникам для подавления синфазного шума. Комплементарные выходы обрабатываются приемниками дифференциальной линии, таким образом, чтобы требуемый сигнал мог быть восстановлен без шумов и искажений, как это показано на рис.7. Эти преимущества связаны с дополнительными затратами для схем дифференциальных драйверов линий и дополнительных сигнальных линий.
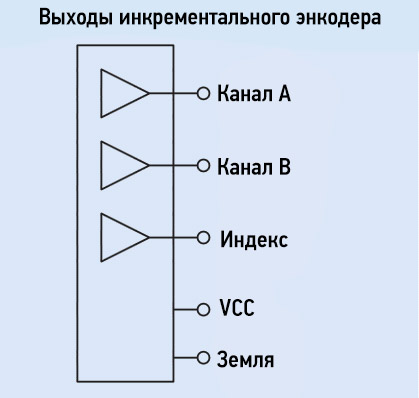
Рис. 5. Схема подключения трехканального энкодера с несимметричным выходом
Выходы дайвера дифференциальных линий, как правило, более устойчивы в отношении электрических помех в сравнении с однопроводными линиями. Эти выходы являются комплементарными, потому, когда сигнал в одной линии высокого уровня, в другой линии он низкого уровня, как это показано на рис.6. Каждая дифференциальная пара состоит из двух проводов; обычно витые пары используются для повышения помехоустойчивости сигнальных линий. Дифференциальные линейные драйверы имеют низкий импеданс, что делает устойчивыми к помехам. Они должны быть подключены к высокоимпедансными дифференциальным приемникам для подавления синфазного шума. Комплементарные выходы обрабатываются приемником дифференциальной линии таким образом, чтобы необходимый сигнал мог быть восстановлен без шумов и искажений, как это показано на рис. 7. Такие преимущества увеличивают цену решения, в связи с высокой стоимостью дифференциальных линейных драйверов и дополнительных сигнальных линий.
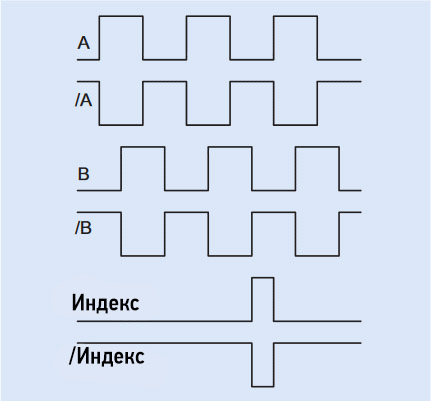
Рис.6. Временная диаграмма драйвера дифференциальной линии энкодера
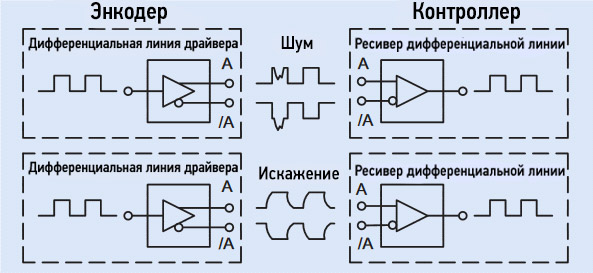
Рис. 7. Обработка дифференциального сигнала линейным драйвером
В чем разница между абсолютными и инкрементальными энкодерами?

Согласно отчету Questale Market Research ожидается значительный рост использования энкодеров в области управления движением к 2022 году. Основными отраслями промышленности, в которых рост будет максимальным, будут – потребительская и промышленная электроника, системы автоматизации, химическая и аэрокосмическая промышленности.
Энкодеры соединяются с валом, и, когда вал вращается, датчик выдает импульсы. Они используются для определения скорости наблюдаемого объекта. Подсчитав количество импульсов на один полный оборот вала, можно рассчитать перемещение. Энкодеры обычно подают сигналы прямоугольной формы в двух каналах, которые смещены друг относительно друга на 90 градусов или находятся в противофазе. Каждое приращение при вращении сдвигает выходной сигнал.
Абсолютные энкодеры
Преимущество абсолютных поворотных энкодеров заключается в том, что они дают
возможность сразу определить положения объекта после включения питания устройства
управления, не теряя драгоценного времени на выполнение поиска механизмами нулевых
меток, то есть привязки объекта к системе отсчёта положения.
Абсолютные энкодеры имеют диск, на котором кроме меток обычного инкрементального
датчика имеются дополнительные метки или прорези, для вычисления абсолютного
положения. Каждая позиция соответствует уникальному коду, и даже движения, которые происходят, когда нет питания, записываются в точные значения положения и могут быть восстановлены сразу после подключения питания.
Существует два типа абсолютных датчиков: однооборотные и многооборотные энкодеры. Однооборотные датчики измеряют перемещения за один оборот или поворот на 360 градусов от начального положения. Процесс повторяется после каждого оборота. Многооборотные датчики измеряют то же самое, что и однооборотные, но также отслеживают количество полных оборотов вала, используя уникальное слово для каждой позиции и количества оборотов.

Абсолютные поворотные датчики предпочтительнее, когда актуальны вопросы безопасности, поскольку они «позиционируют» себя при включении машины. Однооборотные датчики более полезны для коротких перемещений. Многооборотные лучше подходят для более сложных или более длинных перемещений. Последние записывают данные позиции в электронном виде, как правило, в двоичном формате. Еще одним преимуществом является устойчивость к электронному шуму. Однако абсолютные поворотные датчики обычно стоят дороже, чем инкрементальные.
Преимущества абсолютных энкодеров
Инкрементальные энкодеры
Выходной сигнал инкрементальных энкодеров генерируется каждый раз, когда вал проворачивается на определенный угол, а разрешение устройства определяется количеством сигналов на оборот. Каждый раз, когда на датчик подается питания, он начинает отсчет с нуля независимо от того, где находится вал и каково было его предыдущее положение. Необходима установка начальной точки отсчета как при настройке системы в первый раз, так и после отключения питания энкодера. Необходима полная перенастройка инкрементального датчика с начальной точки после отключения.

Поворотные инкрементные энкодеры хранят данные во внешнем буфере или счетчике. Батарейные резервные копии могут помочь устранить необходимость повторной настройки после запланированных или незапланированных остановок. Инкрементальные датчики, как правило, проще в использовании и дешевле, чем абсолютные.
Энкодеры — датчики угла поворота
Инкрементальные энкодеры Lenord Bauer – датчики угла поворота и перемещения для действительно тяжелых условий эксплуатации
Принцип действия бесконтактных инкрементальных энкодеров основан на преобразовании вращательного движения в электрические сигналы. Инкрементальные энкодеры немецкой компании Lenord + Bauer сочетают преимущества магнитной измерительной системы с надежной механической конструкцией. При этом магнитная измерительная система обеспечивает работу без износа механических частей и технического обслуживания.
Защита от неблагоприятных внешних воздействий
Магнитные инкрементальные энкодеры Lenord Bauer зарекомендовали себя повсеместно в различных областях, даже в самых тяжелых условиях эксплуатации. Они отличаются высокой надежностью и длительным сроком службы, что обеспечивается дополнительными конструктивными особенностями:
Защита от воздействия влаги. Электронные компоненты имеют высокоэффективную защиту от повышенной влажности, соленого тумана, а также воздействия едких паров. Всё это гарантирует надежное функционирование даже в самых жестких условиях.
Вывод для водяного конденсата. При работе в условиях многократной конденсации в корпусе может скапливаться вода, которая выводится через специальные отверстия для выпуска конденсата. В качестве альтернативы могут быть использованы спечённые элементы или воздухопроницаемые мембраны.
Защита от вибраций. Дополнительная фиксация механических деталей предохраняет электронные части и соединения внутри инкрементального энкодера от воздействия вибраций, что обеспечивает бесперебойную длительную работу инкрементальных энкодеров даже при воздействии чрезвычайных вибраций и ударов.
Инкрементальные энкодеры со встроенными подшипниками
В настоящее время для автоматического управления в режиме реального времени требуется высокая точность измерений контролируемых параметров. В этом случае используются инкрементальные поворотные энкодеры со встроенными подшипниками. Для этой измерительной системы характерно встраивание сканирующего устройства и целевого колеса в один корпус. Оба компонента точно совмещены друг с другом.
С количеством импульсов до 10 000 инкрементов на оборот, такие энкодеры охватывают все диапазоны измерений на транспорте и проверены многолетней эксплуатацией на железной дороге.
Бесконтактное измерение
Магнитные инкрементные поворотные энкодеры получают значения изменения угла торсионного вала. Встроенные сенсоры бесконтактно сканируют встроенное в корпус целевое колесо. При этом выдаются два сигнала с фазовым сдвигом 90 градусов друг относительно друга. Из этих сигналов можно определить направление вращения, угловое движение, пройденную дистанцию и скорость вращения вала.
После подключения питающего напряжения инкрементальные энкодеры в основном измеряют только разность между референсным значением и начальной позицией. Если имеется отдельный выход для нулевого индекса, возможно определение позиции посредством программы поиска референсных значений.
Магнитный сенсор выдает дифференциальные сигналы 1-Vpp и логические сигналы HTL или TTL.
Инкрементальные энкодеры имеют высокое разрешение – до 266 240 инкрементов на оборот.
Принцип работы
Работу энкодера вращения проще всего объяснить на примере оптического энкодера. Представьте себе вал электродвигателя, на котором закреплен диск с прорезями. С одной стороны диска расположен светоизлучающий элемент, луч света проходит через прорези и регистрируется фотоэлементом, расположенным с другой стороны (устройство, состоящее из спаренных светоизлучающего и принимающего элементов, называется фотопрерыватель). При вращении диска луч прерывается, в результате чего на выходе фотоэлемента мы получим меандр — сигнал прямоугольный формы. И частота меандра будет пропорциональна скорости вращения диска. Таким образом можно судить о скорости вращения вала электродвигателя. 
Однако работающее по описанному принципу устройство не способно определить направление вращения. Чтобы исправить это добавим в него второй фотопрерыватель и расположим с некоторым смещением относительно первого. В зависимости от направления вращения диска сигнал на выходе первого фотопрерывателя будет меняться раньше или позже чем сигнал на выходе второго. А значит, анализируя как меняются эти два сигнала, мы можем определить направление вращения.

На практике смещения сигналов добиваются не за счет особого расположения фотопрерывателей, а путем добавления второй полосы с прорезями или прозрачными и непрозрачными участками. Участки на двух полосах расположены так чтобы обеспечить сдвиг сигнала по фазе на 90 градусов, поэтому работающие по такому принципу энкодеры называются квадратурными.
На этом же принципе основаны механические энкодеры, только вместо фотопрерывателей в них используются скользящие контакты. Основным недостатком таких энкодеров является дребезг контактов, который может приводить к неправильному подсчету сигналов. Кроме того скользящие контакты подвержены износу. Все это ограничивает область применения механических энкодеров.Магнитные энкодеры строятся на базе магниточувствительных элементов, таких как датчики Холла или магниторезистивные датчики. Они просты в изготовлении, лишены недостатков контактных энкодеров и мало чувствительны к внешним факторам. Но все же проигрывают в точности емкостным, индуктивным и оптическим энкодерам.Емкостные энкодеры имеют в своем составе диск асиметричной формы, который при вращении изменяет емкость между двумя электродами. Это изменение регистрируется и используется для определения углового положения. Емкостные энкодеры так же просты в изготовлении и надежны в эксплуатации, из внешних факторов чувствительны только к изменению влажности.Индуктивные энкодеры работают в магнитном поле и используют явление электромагнитной индукции. Благодаря устойчивости к внешним факторам подходят для использования в неблагоприятной среде, когда другие энкодеры могут оказаться ненадежными.Резистивный энкодер работает по тому же принципу что и обычный потенциометр: электрический сигнал на его выходе пропорционален положению ручки энкодера. Собственно и сами потенциометры могут использоваться для отслеживания углового положения, например, их можно увидеть в сервомашинках:











Датчики угла поворота – энкодеры, датчики угла наклона – инклинометры
Датчики угла поворота (энкодеры) подразделяются на инкрементальные и абсолютные, которые могут
достигать очень высокого разрешения. Абсолютные энкодеры в свою очередь могут быть как оптические, так и магнитные и могут работать через шинные интерфейсы. Они безусловно отвечают таким требованиям, как точность, надежность, повышенная износоустойчивость в течении длительного периода эксплуатации.

















Инкрементальные энкодеры предназначены для определения скорости вращения и угла поворота вращающихся объектов. Они генерируют последовательный импульсный цифровой код, содержащий информацию относительно угла поворота объекта. Если вал останавливается, то останавливается и передача импульсов. Основным рабочим параметром датчика является количество импульсов за один оборот. Мгновенную величину угла поворота объекта определяют посредством подсчета импульсов от старта. Для вычисления угловой скорости объекта процессор в тахометре выполняет дифференцирование количества импульсов во времени, таким образом показывая сразу величину скорости, то есть число оборотов в минуту. Выходной сигнал имеет два канала, в которых идентичные последовательности импульсов сдвинуты на 90° относительно друг друга, что позволяет определять направление вращения. Имеется также цифровой выход нулевой метки, который позволяет всегда рассчитать абсолютное положение вала.

Абсолютные энкодеры, как оптические, так и магнитные имеют своей основной рабочей характеристикой число шагов, то есть уникальных кодов на оборот и количество таких оборотов, при этом не требуется первичной установки и инициализации датчика. Наиболее распространённые типы выходов сигнала — это параллельный код, интерфейсы Profibus-DP, CANopen, DeviceNet, SSI, LWL, через которые также осуществляется программирование датчиков. Представленные датчики обладают высоким разрешением вплоть до 36 бит.
Оптические энкодеры имеют жестко и закрепленный соосно валу стеклянный диск с прецизионной оптической шкалой. При вращении объекта оптопара считывает информацию, а электроника преобразовывает ее в последовательность дискретных электрических импульсов. Абсолютные оптические энкодеры — это датчики угла поворота, где каждому положению вала соответствует уникальный цифровой выходной код, который наряду с числом оборотов является основным рабочим параметром датчика. Абсолютные оптические энкодеры, так же как и инкрементальные энкодеры, считывают и фиксируют параметры вращения оптического диска.

Магнитные энкодеры с высокой точностью регистрируют прохождение магнитных полюсов вращающегося магнитного элемента непосредственно вблизи чувствительного элемента, преобразуя эти данные в соответствующий цифровой код.
Представленные датчики соединяются с вращающимся объектом посредством нормального или полого вала, последний может быть как сквозным, так и несквозным (тупиковым). Вал вращающегося объекта и вал энкодера соединяют механически при помощи гибкой или жесткой соединительной муфты. В качестве альтернативы энкодер монтируют непосредственно на вал объекта, если энкодер имеет полый вал. В первом случае вероятная несоосность и допустимые биения компенсируются деформацией гибкой втулки. Во втором возможна фиксация энкодера посредством штифта.
Общее количество предлагаемых нами продуктов от фирмы Baumer IVO превышает тысячу наименований изделий и покрывает значительную потребность рынка автоматизации. Мы гарантируем нашим клиентам, что при заказе продукции из ассортимента, всегда имеющегося на складе, мы отгружаем в течение 3-4 рабочих дней, а всю продукцию, изготавливаемую на заказ, мы отгружаем в пределах 10 рабочих дней.










Инкрементальный энкодер — от А до Я
Что такое инкрементальный энкодер?
Импульсный (пошаговый) энкодеротносится к типу энкодеров, которые предназначены для указания направления движения и/или углового перемещения внешнего механизма. Пошаговый (также именуемый инкрементный или инкрементальный) энкодер формирует импульсы, количество которых соответствует повороту вала на определенный угол. Этот тип энкодеров, в отличие от абсолютных, не формирует код положения вала, когда вал находится в покое. Пошаговый энкодер связан со счетным устройством, это необходимо для подсчета импульсов и преобразования их в меру перемещения вала.
Конструкция инкрементального энкодера
Инкрементальный энкодер (он же пошаговый энкодер) состоит из следующих компонентов: источника света, диска с метками, фототранзисторной сборки и схемы обработки сигнала. Диск пошагового энкодера подразделен на точно позиционированные отметки. Количество отметок определяет количество импульсов за один оборот. К примеру, если диск поделен на 1000 меток, тогда за 250 импульсов вал должен повернуться на 90 градусов.
Диск с метками оптического инкрементного энкодера
Технология (оптическая и магнитная)
В настоящее время широко распространены две технологии исполнения — оптическая и магнитная. 1. В оптическом энкодере первичным датчиком сигнала является оптический диск (как на картинке выше). Количество черных/прозрачных секторов на диске определяет разрешение оптического инкрементального энкодера, также именуемое как количество меток в обороте. 2. В настоящее время становятся очень популярными магнитные энкодеры. В магнитном энкодере сигнал положения вала формируется датчиком Холла. Данная технология открывает новые возможности, например, программируемое количество импульсов в обороте, причем некоторые производители энкодеров предоставляют такую возможность (программирования) самому Заказчику, что значительно облегчает подбор энкодера для своей конкретной задачи. Так, например, стало простой задачей заменить в оборудовании вышедший из строя энкодер с «экзотическим» числом импульсов в обороте, например, 1234 вместо более привычных 1024. В оптическом энкодере такое разрешение, как упоминалось выше, возможно только при «физическом» наличии нанесенных на диск меток.
Квадратура выхода (выходы А и В)
 Квадратура сигналов инкрементального датчика угла поворота
Квадратура сигналов инкрементального датчика угла поворота
Максимальная частота ответа
Максимальная частота ответа является частотой, при которой вращающийся энкодер может дать электрический ответ. Такая частота имеет отношение к количеству выходных импульсов, на которые энкодер реагирует в секунду. Следовательно, энкодер пошагового типа должен удовлетворить следующее отношение: (rpm/60) x (разрешение) ≤ максимальной частоты ответа.
Указатель нулевой отметки / импульс полного оборота (выход N)
В энкодере, имеющем этот выход, импульс на этом выходе появляется в каждом обороте вала. Функция показателя нуля может использоваться для сброса внешне связанного счетчика или для регистрации начальной (нулевой) позиции.
Соединительный вал
Для механического соединения вала датчика с внешним механизмом следует использовать специальный гибкий соединитель (эластичную муфту), который предназначен для компенсации возможного биения валов, как в радиальном, так и в осевом направлении. Это позволяет резко снизить вероятность преждевременного износа подшипников вала датчика. Уже незначительный, возникший в осевом направлении вала, люфт может привести к полному электрическому отказу энкодера. Это связано с тем, что для достижения высокого разрешения, оптический диск и считывающая матрица располагаются в непосредственной близости друг от друга и минимальное осевое биение вала может привести к их механическому контакту, что в последствии приведет к разрушению нанесенных на диск меток.










Подключение инкрементного энкодера к Ардуино
пример создания такого меню 
Подключим энкодер к Ардуино по следующей схеме:


Использование
Подключение
Датчик использует два стандартных 3-пиновых разъема и подключается в контроллера «Трекдуино». Для подключения одного датчика требуется 2 свободных порта (по одному на каждый канал). Всего можно подключить и использовать до 4 энкодеров.
При подключении датчика следует выбрать, какой из проводов будет «каналом А», а какой — «каналом B». Соответствие каналов и проводов не фиксированное, пользователь сам должен выбрать в зависимости от ситуации, руководствуясь при это правилом: при чтении показаний датчика программа будет принимать за положительное направление вращение от «А» в сторону «В», например:


Программирование
Блоки, необходимые для работы с энкодером, расположены в группе блоков «Датчики».
При использовании энкодеров первым делом необходимо выполнить установку всех подключенных энкодеров в секции с помощью блока в графическом режиме или функции в текстовом режиме.
Изменение переменных, в которых хранятся углы поворота энкодеров, происходит с помощью т.н. механизма прерываний, поэтому эти показания будут меняться даже если программа занята чем-либо, например, выполняет функцию задержки. Поэтому обращаться за показаниями энкодера можно сколь угодно редко, «срабатывания» оптических датчиков пропускаться не будут.










Точность энкодера (минимальный шаг)- 5 градусов.
Счетчик (переменная), в которой храниться угол поворота, переполняется при ± 2,147,483,645 градусах (около 6 миллионов оборотов). Впрочем, ресурс самого датчика гораздо меньше
| Блок и генерируемая им функция | Описание |
|---|---|
| Выполняет установку энкодера, сообщает программе, к каким портам он подключен. Необходимо вызывать в секции «Установка» для каждого подключенного энкодера.Аргументы: — условный номер энкодера, по которому в дальнейшем к нему будет обращаться функция опроса. — порт IN, к которому подключен провод канала А — порт IN, к которому подключен провод канала B | |
| Возвращает угол поворота определенного энкодера в градусах.Аргументы: — условный номер энкодера, угол поворота которого необходимо сообщить | |
| Обнуляет текущие показания по определенному энкодеру, «сбрасывает» счетчик.Аргументы: — условный номер энкодера, показания которого необходимо обнулить |
Абсолютный оптический энкодер
Абсолютные энкодеры обычно используются в приложениях с медленным вращением в которых недопустима потенциальная потеря информации о положении. Элементы дискретного детектора в фотоэлектрической матрице индивидуально совмещены с концентрическими дорожками на светопрерывателе, создавая эффект бесконтактной реализации энкодера с щеточными контактами. Назначение отдельной дорожки для каждого бита результирующего разрешения приводит к дискам большего размера (по сравнению с конструкцией инкрементного энкодера) и соответствующему снижению допустимого отклонения при ударе и вибрации. При этом каждая дополнительная дорожка энкодера удваивает разрешение, но учетверяет стоимость датчика.

Принцип действия абсолютного оптического энкодера
Вместо последовательного потока битов, как в инкрементном датчике, абсолютные оптические энкодеры обеспечивают параллельный вывод слова данных с уникальным кодом шаблона для каждого дискретного положения вала. Чаще всего используется код Грея, двоичное и двоично-десятичное кодирование. Характерной особенностью кода Грея (по имени изобретателя Франка Грея из Bell Labs) является то, что только один бит изменяется за раз, помогая избежать тем самым асинхронных неоднозначностей, обусловленными электронными и механическими допусками элементов. С другой стороны, двоичный код постоянно включает множество измененных битов при увеличении или уменьшении счета на единицу. Например, при переходе из положения 255 в положение 0, восемь бит меняются с 1 в 0. Так как нет никакой гарантии, что все пороговые детекторы, являющиеся элементами слежения детектора сработают одновременно, в момент перехода будет присутствовать значительная неопределенность в данной схеме кодирования. Поэтому требуется дополнительный сигнал подтверждения правильности данных, если больше чем один бит изменился между последовательными положениями энкодера.

Поворот 8-битного диска с кодом Грея
На рисунке слева поворот против часовой стрелки на одну позицию становится причиной изменения только одного бита. На рисунке справа такой же поворот двоично-кодированного диска станет причиной изменения всех битов в частном случае (с 255 в 0) иллюстрируя тем самым опорную линию на 12 часов.










Абсолютные энкодеры лучше всего подходят для медленных и/или редких поворотов, таких как кодирование угла поворота рулевого колеса, в отличие от измерения высокоскоростного непрерывного (например, ведущее колесо) вращения, которое потребует вычисления смещения вдоль всего пути движения. Хотя и не столь надежны как резольверы для высокотемпературных или в приложениях с высокой ударной стойкостью, абсолютные энкодеры могут работать при температурах свыше 125 градусов и средним разрешением (1000 отсчетов на оборот). Потенциальным недостатком абсолютных энкодеров является их параллельный вывод данных, который требует более сложного интерфейса из-за большего количества проводов. 13-битный абсолютный энкодер, использующий дополнительные выходные сигналы для помехоустойчивости потребует 28-жильный кабель (13 сигнальных пар плюс питание и заземление) вместо шести в случае с резольвером или инкрементным энкодером.