Динамический потолок
Полезное
Смотреть что такое «Динамический потолок» в других словарях:
динамический потолок — Диаграммы полёта для достижения динамического потолка. динамический потолок 1) Д. п. самолёта наибольшая высота, достигаемая самолётом в неустановившемся полёте. В области установившихся режимов полёта (ниже линии статических потолков,… … Энциклопедия «Авиация»
динамический потолок — Диаграммы полёта для достижения динамического потолка. динамический потолок 1) Д. п. самолёта наибольшая высота, достигаемая самолётом в неустановившемся полёте. В области установившихся режимов полёта (ниже линии статических потолков,… … Энциклопедия «Авиация»
Динамический потолок — летательного аппарата наибольшая высота полета, которую можно достичь за счёт запаса кинетической энергии в неустановившемся подъёме и на которой ещё можно создать минимально необходимый для сохранения управляемости скоростной напор. Для… … Википедия
Потолок — летательного аппарата наибольшая высота, которую может набрать летательный аппарат при данном полётном весе. Различают статический потолок (для вертолётов потолок висения), практический потолок и динамический потолок. П. является одной из… … Энциклопедия техники
ПОТОЛОК — 1. Потолок самолета предельная высота подъема самолета при данной нагрузке. 2. Максимальная высота, которую может достигнуть данный дирижабль или аэростат. Различают: статический потолок высоту, достигаемую при сбрасывании всего балласта и при… … Морской словарь
потолок — летательного аппарата наибольшая высота, которую может набрать летательный аппарат при данном полётном весе. Различают статический потолок (для вертолётов потолок висения), практический потолок и динамический потолок. П. является… … Энциклопедия «Авиация»
потолок — летательного аппарата наибольшая высота, которую может набрать летательный аппарат при данном полётном весе. Различают статический потолок (для вертолётов потолок висения), практический потолок и динамический потолок. П. является… … Энциклопедия «Авиация»
Потолок висения — Теоретический потолок (или статический потолок) летательного аппарата наибольшая высота полета, на которой при максимальной тяге двигателей вертикальная скорость установившегося подъёма равна нулю. Эта высота в применении к вертолётам носит… … Википедия
ПОТОЛОК — ПОТОЛОК, лка, муж. 1. Верхнее внутреннее покрытие помещения. Лампа под потолком. Ростом под п. (очень высок; разг.). 2. Предельная высота подъёма летательного аппарата (спец.). Статический п. (при длительном полёте с установившейся скоростью).… … Толковый словарь Ожегова
динамический потолок
Диаграммы полёта для достижения динамического потолка.
динами́ческий потоло́к 1) Д. п. самолёта наибольшая высота, достигаемая самолётом в неустановившемся полёте. В области установившихся режимов полёта (ниже линии статических потолков, см. рис.) может быть достигнуто равенство внешних сил, действующих на самолёт. Выше линии статических потолков силы не могут быть уравновешены, поэтому полёт может быть только неустановившимся; переход в эту область возможен лишь путём преобразования части кинетической энергии самолёта в потенциальную. Однако достижение максимальной энергетической высоты, равной максимальной удельной энергии самолёта, неосуществимо. Максимальная удельная энергия e реализуется в горизонтальном установившемся полёте при максимальной тяге двигателей. Для перевода самолёта в режим набора высоты необходимо увеличить угол атаки, что приводит к увеличению аэродинамического сопротивления, в результате чего нарушается баланс сил и производная удельной энергии de/dt = Vnx (V скорость самолёта, nx, продольная перегрузка) становится отрицательной. Таким образом, переход в область выше линии статических потолков возможен только из тех точек, в которых производная удельной энергии в горизонтальном полёте положительна, то есть из области, лежащей ниже линии статических потолков. Возможно несколько типов такого перехода. Если при максимальной тяге создать угол атаки, при котором тяга уравновешивает сопротивление, то переход будет совершаться по линии e = const. Параметры траектории (скорость, высота, угол наклона траектории) будут изменяться, причем максимальное значение угла наклона траектории достигается в точке статического потолка. Для обеспечения максимальной высоты в таком движении выход на него из горизонтального полёта нужно производить из точек границ области, допускаемой по скоростному напору или по Маха числу полёта М∞. Самолёт может достичь большей высоты, если закон управления усложнить. Движение также должно начинаться из точек границ области при максимальной тяге двигателей. На первом участке полёта угол атаки необходимо выдерживать таким, чтобы обеспечить движение с максимально допустимой нормальной перегрузкой (если она достигается). По мере увеличения высоты угол атаки увеличивается до значения, максимально допустимого условиями устойчивости полёта, и на остальной части траектории остаётся постоянным. Такой полёт происходит с уменьшением удельной энергии, поэтому после достижения Д. п. при снижении самолёт переходит в горизонтальный установившийся полёт в точке области с меньшим значением удельной энергии. Максимальное значение высоты полёта на этой линии является практически достижимым Д. п., если в этой точке области режимов полёта выполняются требования устойчивости, управляемости и обеспечивается работа силовой установки. Использование неустановившихся режимов полёта наиболее эффективно для скоростных самолётов, кинетическая энергия которых составляет большую часть полной энергии. Расчёты и практические рекордные полёты показывают, что для сверхзвуковых самолётов динамический потолок может превышать статический на 1015 км.
2) Д. п. вертолёта наибольшая высота, достигаемая вертолётом в полёте с поступательной скоростью.
Литература:
Микоян С. А., Динамический метод набора высоты, в сборнике: Лётчику о практической аэродинамике, М., 1961.
Полезное
Смотреть что такое «динамический потолок» в других словарях:
Динамический потолок — 1) Д. п. самолёта наибольшая высота, достигаемая самолётом в неустановившемся полёте. В области установившихся режимов полёта (ниже линии статических потолков) может быть достигнуто равенство внешних сил, действующих на самолёт. Выше линии… … Энциклопедия техники
динамический потолок — Диаграммы полёта для достижения динамического потолка. динамический потолок 1) Д. п. самолёта наибольшая высота, достигаемая самолётом в неустановившемся полёте. В области установившихся режимов полёта (ниже линии статических потолков,… … Энциклопедия «Авиация»
Динамический потолок — летательного аппарата наибольшая высота полета, которую можно достичь за счёт запаса кинетической энергии в неустановившемся подъёме и на которой ещё можно создать минимально необходимый для сохранения управляемости скоростной напор. Для… … Википедия
Потолок — летательного аппарата наибольшая высота, которую может набрать летательный аппарат при данном полётном весе. Различают статический потолок (для вертолётов потолок висения), практический потолок и динамический потолок. П. является одной из… … Энциклопедия техники
ПОТОЛОК — 1. Потолок самолета предельная высота подъема самолета при данной нагрузке. 2. Максимальная высота, которую может достигнуть данный дирижабль или аэростат. Различают: статический потолок высоту, достигаемую при сбрасывании всего балласта и при… … Морской словарь
потолок — летательного аппарата наибольшая высота, которую может набрать летательный аппарат при данном полётном весе. Различают статический потолок (для вертолётов потолок висения), практический потолок и динамический потолок. П. является… … Энциклопедия «Авиация»
потолок — летательного аппарата наибольшая высота, которую может набрать летательный аппарат при данном полётном весе. Различают статический потолок (для вертолётов потолок висения), практический потолок и динамический потолок. П. является… … Энциклопедия «Авиация»
Потолок висения — Теоретический потолок (или статический потолок) летательного аппарата наибольшая высота полета, на которой при максимальной тяге двигателей вертикальная скорость установившегося подъёма равна нулю. Эта высота в применении к вертолётам носит… … Википедия
ПОТОЛОК — ПОТОЛОК, лка, муж. 1. Верхнее внутреннее покрытие помещения. Лампа под потолком. Ростом под п. (очень высок; разг.). 2. Предельная высота подъёма летательного аппарата (спец.). Статический п. (при длительном полёте с установившейся скоростью).… … Толковый словарь Ожегова
Энергетическая высота. Статический и динамический потолок самолета.
Полная механическая энергия самолета определяется как сумма кинетической и потенциальной энергии:  .
.
Разделив Е на силу тяжести G=mg, получим удельную (т.е. приходящуюся на единицу веса) энергию самолета. Этот параметр называется энергетической высотой (так как имеет размерность длинны):  .
.
Физический смысл  — это высота, на которую мог бы подняться самолет при постоянной полной энергии и падении скорости полета до нуля.
— это высота, на которую мог бы подняться самолет при постоянной полной энергии и падении скорости полета до нуля.
Динамический потолок самолета.
Достижение высот больше теоретического статического потолка  может осуществляться только динамически, т.е. только путем расходования запаса кинетической энергии самолета (при уменьшении скорости полета).
может осуществляться только динамически, т.е. только путем расходования запаса кинетической энергии самолета (при уменьшении скорости полета).
Динамический потолок самолета  — это наибольшая высота, которой может достичь самолет за счет использования запаса кинетической энергии при уменьшении скорости полета до эволютивной
— это наибольшая высота, которой может достичь самолет за счет использования запаса кинетической энергии при уменьшении скорости полета до эволютивной  , на которой ещё сохраняется управляемость ЛА.
, на которой ещё сохраняется управляемость ЛА.
Начинается набор динамического потолка с высоты и скорости, при которых полная энергия самолета максимальна: 
В первом приближении динамический потолок определяется при следующем допущении: полная энергия самолета в процессе достижения не изменяется.
Для более точного определения динамического потолка необходимо учитывать потери энергии ЛА при наборе высоты и использовать вариационный метод.

Рекорд динамического потолка для самолета с ТРД равняется 37650 м. Он установлен в 1977году советским самолетом Е-266М (модернизированным МиГ-25) и до сих пор не побит.
20. Планиpование самолета. Оптимальные pежимы. Поляpная диагpамма скоpостей планиpования.
Планирование – снижение с нулевым или близко к нулю тягой.
Расчет снижения – это определение основных параметров движения самолета при снижении:  . Он производится по методике, аналогичной расчету набора высоты, однако имеет свои особенности, так как
. Он производится по методике, аналогичной расчету набора высоты, однако имеет свои особенности, так как 
Уравнение установившегося планирования самолета при Р=0. Система уравнений:


Оптимальные режимы планирование самолета – это режимы, обеспечивающие при заданной начальной высоте Н, 1) максимальную дальность планирования 2) максимальное время планирования
Максимальная дальность планирования  ,
,

Максимальное время планирования 
При Р=0 
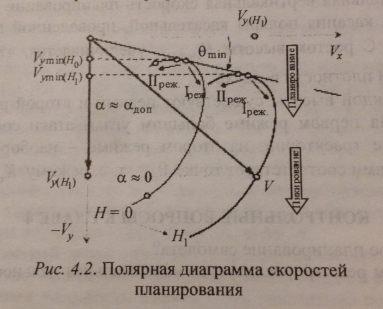
Поляpная диагpамма скоpостей планиpования.
 Зависимость между воздушной скоростью V, вертикальной скоростью снижения
Зависимость между воздушной скоростью V, вертикальной скоростью снижения  и углом наклона траектории
и углом наклона траектории  при снижении самолета может быть изображена графически.
при снижении самолета может быть изображена графически.
Полярная диаграмма строится для ряда значений высоты Н при G=const по уравнения установившегося планирования
Алгоритм построения следующий.
1. Задаем ряд значений  от малого значения (
от малого значения (  0,1) до
0,1) до  .
.
2. Для каждого по поляре находим  .
.
3. Для соответствующих  вычисляем качество
вычисляем качество
4. Вычисляем тангенс угла наклона траектории: 
5. Находим угол наклона траектории  .
.
6. Вычисляем скорость полета:  .
.
7. Вычисляем вертикальную скорость:  .
.
По полярной диаграмме можно сделать ряд выводов.
· Минимальный угол наклона траектории при планировании  не зависит от высоты полета (поскольку не зависит от нее максимальное качество) и соответствует касательной, проведенной к поляре скоростей планирования из начала координат.
не зависит от высоты полета (поскольку не зависит от нее максимальное качество) и соответствует касательной, проведенной к поляре скоростей планирования из начала координат.
· Минимальная вертикальная скорость планирования определяется как точка касания поляры касательной, проведенной параллельно оси абсцисс. С ростом высоты  увеличивается, что связанно с уменьшением плотности воздуха.
увеличивается, что связанно с уменьшением плотности воздуха.
· Для каждой высоты существуют первый и второй режимы планирования. На первом режиме большим углам атаки соответствуют более пологие траектории, на втором режиме – наоборот. Граница между режимами соответствует точке , т.е. режиму 
Дальность полёта. Основные понятия. Система уравнений для расчёта дп.
Дальность полета.
Дальность полета: расстояние по горизонтали, которое пролетит самолет от взлета, до посадки. (Длина проекции траектории на землю)
Продолжительность полета: время нахождения самолета в воздухе. Дальность и продолжительность полета зависят от многих факторов. Различают техническую; тактическую дальность итд.
Располагаемый запас топлива: топливо, которое тратится на набор высоты крейсерский полет и снижение.
Дальность считают с учетом всего располагаемого топлива – на прогрев – на рулежку, отнимается при этом техническая дальность. АНЗ- аэроновигационный запас топлива(с учетом захода на второй круг или на соседний аэродром). Дальность полета с учетом АНЗ- параметрическая дальность.
Радиус действия- наибольшее расстояние, на которое может удалиться самолет с последующим возвращением на аэродром.
Полная дальность: складывается из дальности набора, горизонтального полета и снижения.
ПОТОЛОК САМОЛЕТА
С подъемом на высоту избыток тяги уменьшается и на какой-то определенной высоте становится равным нулю. А это значит, что и вертикальная скорость установившегося подъема тоже уменьшится до нуля. На этой высоте и выше самолет не имеет возможности совершать установившийся подъем.
Высота полета, на которой вертикальная скорость установившегося подъема равна нулю, называется теоретическим (или статическим) потолком самолета.
На теоретическом потолке избытка тяги нет, поэтому возможен только горизонтальный полет и только на наивыгоднейшем угле атаки (и только на наивыгоднейшей скорости), на которой наименьшая потребная тяга. Диапазон скоростей при этом равен нулю (рис. 6).

При установившемся подъеме самолет практически не может достигнуть теоретического потолка, так как по мере приближения к нему избыток тяги становится настолько мал, что для набора оставшейся высоты потребуется затратить слишком много времени и топлива. Из-за отсутствия избытка тяги полет на теоретическом потолке практически невозможен, потому что любые нарушения режима полета без избытка тяги нельзя устранить. Например, при случайно образовавшемся даже небольшом крене самолет теряет значительную высоту (проваливается). Поэтому кроме понятия теоретического (статического) потолка введено понятие так называемого практического потолка.
Условно считают, что практический потолок самолета есть высота, на которой максимальная вертикальная скорость подъема равна 0,5 м/с.
Разница между теоретическим и практическим потолком у современных самолетов невелика и не превышает 200 м. Теоретический и практический потолки можно определить по графику (см. рис. 6).
Современные самолеты при полете с большими скоростями полета обладают настолько большим запасом кинетической энергии  что могут использовать его для набора высоты. Причем если самолет летит вблизи практического потолка, то он за счет использования запаса кинетической энергии, сохраняя управляемость, может подняться на высоту, большую его теоретического потолка, даже при отсутствии избытка тяги.
что могут использовать его для набора высоты. Причем если самолет летит вблизи практического потолка, то он за счет использования запаса кинетической энергии, сохраняя управляемость, может подняться на высоту, большую его теоретического потолка, даже при отсутствии избытка тяги.
Рис.7. Подъем самолета на динамический потолок
Максимальная высота, набираемая самолетом за счет запаса кинетической энергии, на которой можно создать скоростной напор, необходимый для сохранения управляемости, называется динамическим потолком.
Если в горизонтальном полете вблизи практического потолка Ннач самолет имеет скорость Vнач и обладает кинетической энергией  , то при дополнительном наборе высоты ΔН скорость самолета уменьшится до Vкон =Vэв (минимальная эволютивная скорость, при которой еще сохраняется управляемость) и его кинетическая энергия станет равной
, то при дополнительном наборе высоты ΔН скорость самолета уменьшится до Vкон =Vэв (минимальная эволютивная скорость, при которой еще сохраняется управляемость) и его кинетическая энергия станет равной  но зато самолет приобретет дополнительную потенциальную энергию
но зато самолет приобретет дополнительную потенциальную энергию 
 (12)
(12)
После преобразований получим


 (13)
(13)
Как видим из формулы, прирост высоты за счет уменьшения скорости на величину ΔV тем больше, чем выше средняя скорость самолета.
Достичь динамического потолка можно следующим образом: на некоторой высоте самолет разгоняется до максимальной скорости и выполняет горку. Перевод самолета на горку достигается увеличением подъемной силы Y.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Задача 3 максимальная дальность полета камня
Для геликоптера (вертолет) максимальная высота полета определяется двумя «потолками»: статическим и динамическим. В первом случае речь идет о вертикальном подъеме только с помощью несущего винта. Этот показатель обычно ниже. Во втором случае подъем осуществляется и с помощью винта, и за счет скорости линейного перемещения. В таком случае можно подняться выше.

Вертолет: особенности
У самолета подъемная сила образуется за счет скорости и конфигурации крыла. Совсем иначе поднимается вверх вертолет. Максимальная высота полета редко превышает 3000-3500 м. Для поднятия используется силовая установки и несущий винт. Скорость не сравнима с самолетами, зато вертолет может легко взлетать без разбега, садиться на неподготовленную посадочную полосу, зависать на месте, перемещаться боком.
По инструкции, пилотам запрещается выключать двигатели во время посадки на высотных площадках от 3000 метров. Нормальная работа для большинства вертолетов в штатном режиме возможна до 4,5 км. Выше этого порога воздух становится разреженным и лопастям винтов нужно придавать предельные углы атаки. А это может приводить к нештатным ситуациям.
Немного истории
Однако к началу XX столетия пальму первенства надолго захватили самолёты. Чтобы «догнать» их и утвердиться вертолётам понадобилось без малого полвека. Все споры о том, кто из них лучше, лишены основания только потому, что эти машины по-разному летают.
Суть вопроса в способе создания необходимой подъёмной силы. Если у самолёта это происходит с помощью крыла, то у вертолёта – благодаря несущим винтам, приводимым в движение поршневым или турбовинтовым двигателем. Основному достоинству самолётов – скорости, вертолёт противопоставляет свои, не менее весомые козыри – способность вертикально взлетать и садиться без традиционного разбега, зависать в воздухе и перемещаться в любом направлении.
Разновидности
Для объективного определения показателей необходимо выделять, к какому типу относится вертолет. Максимальная высота полета может быть установлена для четырех подклассов винтокрылых машин, на которые их поделила Международная авиационная федерация (FAI) в соответствии с конструктивными особенностями.
Кроме вертолетов, еще определяют автожиры, у которых основной винт не изменяет угол наклона и используется только для создания подъемной силы. Еще один подкласс – конвертопланы. Их винты вместе с двигателями при взлете направлены вверх, а во время горизонтального полета поворачиваются и работают, как самолетные. Отдельно выделяют подкласс винтокрылов, у которых для создания подъемной силы, кроме основного винта, используются и боковые аэродинамические плоскости на корпусе (крылья).
Еще все геликоптеры разделяют на пять групп в зависимости от взлетной массы: от 500 кг до 4500 кг. Кроме этого, определяют тип назначения: гражданские или военные. Среди них могут выделяться отдельные подклассы в зависимости от специфики использования: транспортные, многоцелевые, поисково-спасательные, пожарные, сельскохозяйственные, вертолеты-краны и прочие.
Какие бывают потолки
Для характеристики возможностей гражданских вертолетов используют теоретический и практический потолок.
Теоретический, или статический, потолок
Это максимальная высота, которую винтокрылая машина может достичь при вертикальном взлете. Данный показатель также называют потолком висения. После достижения теоретического потолка вертолету не хватает мощности двигателя и тяги винта для набора высоты.
Статический потолок характеризует технические возможности вертолета, но на практике не используется. Теоретическая максимальная высота для вертолета Ми-8 равна 3980 м. Это не значит, что пилоты поднимаются почти на 4 км при вертикальном взлете. Для достижения статического потолка двигатель должен работать на пределе возможностей, а лопасти винта ‒ иметь максимальный угол атаки для создания подъемной силы. В такой ситуации существует риск срыва потока и развития внештатной ситуации.
Теоретический потолок вертолета Bell 407 составляет 3720 м, но в обычных условиях пилоты не набирают такую высоту вертикально
Практический, или динамический, потолок
Это максимальная высота, которую вертолет может набрать во время движения в двух плоскостях: вертикальной и горизонтальной. Этот показатель также называют сервисным потолком. Практический потолок считается показателем высоты, на которой конкретное воздушное судно может летать.
На практике гражданские вертолеты в режиме визуального полета редко достигают практического потолка. Показатель для Airbus H175 составляет 6000 м. На этой высоте летает большая авиация: пассажирские и транспортные лайнеры, военные борты. Вертолеты малой авиации летают на высоте нескольких сотен метров.
Практический потолок Airbus H175 составляет 6 км, но на практике на такой высоте летает только большая авиация
Вертолет: максимальная высота полета
И статический, и динамический «потолки» имеют предельные показатели. Ограничения вводятся для определения границ, превышение которых может приводить к срыву воздушного потока с лопастей несущего винта. Уверенней винтокрылые машины держатся в воздухе на высотах до 4500 м с определением максимального «потолка» у отдельных машин до 6 км.
Максимальная высота полета вертолета, зафиксированная как абсолютный рекорд, составляет 12442 м. Установил его французский воздухоплаватель Жан Буле. Его Aerospatiale «Лама», относящийся к подклассу «вертолеты», смог преодолеть 12-километровый рубеж в 1972 году. Тот полет мог закончиться фатально, так как на высоте, где температура была ниже – 60 °С, заглох двигатель. Пилоту пришлось установить еще один рекорд – максимальное высотное снижение в режиме самовращения основного винта.
Вертолет Ми-8МСБ установил мировой рекорд по предельной высоте
Вертолет «Акула»
Принятая на вооружение двухвинтовая машина с соосным их расположением — Ка-50 — имеет статический потолок, определенный техническими характеристиками на уровне 4000 метров. Максимальная высота полета вертолета «Акула» в динамике может составлять до 5500 метров. Скорость полета в крейсерском режиме – 260 км/час, боком – 80 км/час, задом – до 90 км/час. Высоту набирает в режиме 28 м/с. Способен выполнить полную «мертвую петлю», хоть такой маневр опасен из-за высокой вероятности схлестывания винтов.
Для сравнения максимальная высота полета вертолета Ми-26 составляет 6500 м, а у Ми-28 – 5800 м. Американский Apache АН-64 может подниматься до 6400 м. Модернизированный Ка-52 «Аллигатор», так же, как и «Акула», летает на высоте 5700 м.
Набор высоты по вертикали. Вертолет.
Набор высоты по вертикали является тяжелым режимом. Это объясняется двумя обстоятельствами. Первое заключается в том, что тяга несущего винта, кроме веса вертолета, должна преодолевать еще и сопротивление фюзеляжа вертолета, которое создается при обдуве его потоком сверху вниз.
При этом направлении обдува площадь фюзеляжа, создающая вредное сопротивление, оказывается наибольшей. Приспособленная для обдува спереди назад вся конструкция фюзеляжа имеет по направлению сверху вниз плохую обтекаемость. Из этих соображений было бы желательно, чтобы несущий винт развивал наибольшую тягу при затрате данной мощности. Однако этого не происходит, так как винт при вертикальном наборе высоты, работающий под углом А = — 90°, развивает из-за отсутствия обдува в плоскости вращения винта наименьшую тягу при затрате на него данной мощности, что и является вторым обстоятельством, обусловливающим трудность набора высоты по вертикали.
Эти два обстоятельства и определяют собой большую нагрузку двигателя при вертикальном наборе высоты.
При вертикальном наборе высоты на вертолет действуют подъемная сила несущего винта, реактивный момент от
Очевидно, что вертикальная скорость набора или, как ее называют, скороподъемность, может увеличиваться до тех пор, пока располагаемая тяга превышает потребную. Если построить для каждой высоты графики, потребной и располагаемой тяг, то точка пересечения этих кривых даст на графике величину наибольшей скороподъемности для каждой дайной высоты. Имея значения наибольшей скороподъемности для нескольких высот, можно построить график скороподъемности.
Располагаемая тяга зависит от мощности двигателя, а последняя с высотой изменяется. В силу этого с высотой изменяется и величина скороподъемности. Если у земли скороподъемность при наличии высотного двигателя равна 2,5 м/сек, то на высоте одного километра она составляет 2,75 м/сек, а на высоте двух километров — 3,0 м/сек.
На высоте 3 км скороподъемность равна нулю, а это означает, что вертолет достиг статического потолка.
Если на вертолете установлен высотный двигатель, то скороподъемность до расчетной высоты двигателя увеличивается, а после расчетной высоты уменьшается, как и при невысотном двигателе.
Статический потолок при установке на вертолет высот-
Вокруг оси У действуют реактивный момент несущего винта, момент от тяги рулевого винта и момент от боковой силы несущего пинта S.
Вокруг оси Z де11ствуют моменты от силы несущего, от продольной силы несущего винта Н и, наконец, реактивный момент рулевого винта.
Не уточняя величины этих моментов и способы их уравновешивания, скажем только, что летчик, правильно воздействуя на органы управления, всегда может сбалансировать вертолет так, чтобы он перемещался с постоянной скоростью, на одной и той же высоте, прямолинейно, без кабрирования или пикирования, без крена и рысканья.
Если вертолет устойчив, то в полете под действием внешних сил (например, порыва ветра) вертолет отклонится в ту или иную сторону, однако без вмешательства летчика возникают силы и моменты, которые восстановят вертолет в первоначальное положение.
При полете на неустойчивом вертолете летчик должен все время отклонять органы управления (ручку управления вертолетом, педали и рычаг «шаг-газ»), удерживая вертолет в равновесии.
Следует сказать, что обеспечение устойчивости вертолета является труднейшей задачей для конструкторов.
Для всякого летательного аппарата тяжелее воздуха важнейшим параметром горизонтального полета является максимальная скорость. Поэтому часто задают вопрос, велика ли максимальная скорость полета вертолета? И когда следует ответ, что не более 200 км/час, то разочарованно качают головой. А между тем, как это уже было доказано в начале книги, вопрос о максимальной скорости полета вертолетов не является первостепенным критерием для их оценки.
Разберем, почему же вертолет не может летать с большими скоростями?
Скорость полета вертолета ограничена началом появления срыва обтекания на отдельных участках лопастей несущего винта.
Дело в том, что лопасти несущего винта, как и крыло, развивают большую подъемную силу при малом сопротивлении только в определенном диапазоне углов атаки и скоростей.
Например, коэффициент подъемной силы одного из профилей с увеличением угла атаки возрастает только до значения угла атаки, после чего происходит резкое падение подъемной силы.
Угол атаки 13° называется критическим углом атаки данного профиля. Во избежание срыва обтекания в полете недопустимо увеличивать угол атаки выше критического.
Между тем картина распределения углов атаки несущего винта чрезвычайно разнообразная.
Мы видим, что профиль на конце лопасти несущего винта в течение оборота меняет угол атаки от 4 до 12°.
Если для различных азимутальных положений записать величину углов атаки на конце лопасти несущего винта, то получим следующие данные:
По данным этой таблицы построим график изменения углов атаки сечения лопасти несущего шипа на радиусе г в зависимости от азимута.
На графике видно, что угол атаки концевого профиля несущего винта при угле около 270° приближается к критическим углам. Это значит, что достаточно допустить незначительное отступление от заданного режима полета (завышение скорости, недостаточное число оборотов), как начнется срыв обтекания, который приведет к тому, что на целом участке диска несущего винта почти не будет создаваться подъемная сила, зато будет повышенное сопротивление движению лопасти.
С появлением срыва на несущем винте вертолет сильно вибрирует, ухудшаются его устойчивость и управляемость. Степень ухудшения летных данных вертолета зависит от величины той площади, которая охвачена срывом. Небольшой участок срыва допустим, тогда как срыв на площади более 20°/о диска винта уже может оказаться трудно исправимым.
Показана величина участка, охваченного срывом, для несущего винта диаметром 12 м, имеющего профиль с критическим углом атаки в 12°, при 200 об/мин. При скорости полета в 80 км/час область срыва на несущем винте еще незначительна, около 8%. При увеличения скорости то 130 км/час область срыва уже распространилась почти на 20% сметаемой площади винта. Это требует срочно уменьшить угол атаки профиля, что может быть сделано в первую очередь уменьшением общего шага несущего винта, а также уменьшением скорости полета и увеличением оборотов винта.
Для предупреждения срыва целесообразно на концах лопастей иметь профили с большими критическими углами атаки.
Плохой уход за обшивкой лопастей винта и ее обледенение в полете могут резко снизить критические углы атаки, на которых начинается срыв.
Таким образом, срыв обтекания при достижении критических углов атаки у отступающей лопасти является первым обстоятельством, ограничивающим полет вертолета с большими скоростями.
Следует тут же оговориться, что увеличение числа оборотов несущего винта, как мера борьбы со срывом, может оказаться неэффективной, так как в результате этого может наступить срыв обтекания по другим причинам, а именно скоростной срыв.
Скоростной срыв на профиле несущего винта может появиться на любых углах атаки, на всем рабочем диапазоне углов в том случае, когда движение профиля происходит с числом М большим, чем М критическое.
Критическим числом Мир называют такое число М, при котором на отдельных участках профиля появляются зоны сверхзвукового обтекания и, как следствие этого, волновое сопротивление.
Если скорость движения профиля винта в воздухе значительно меньше скорости звука (число Л1 невелико), то поток плавно обтекает профиль, а воздух в этих условиях принципиально можно рассматривать как несжимаемую среду, т. е. не меняющую своей плотности и температуры при изменении давления.
Оказывается, что в некоторых условиях со сжимаемостью воздуха надо считаться, а в некоторых случаях свойством сжимаемости можно пренебречь.
Скорость движения профиля равна или менее 30% скорости звука, сжимаемостью воздуха можно пренебречь совсем, так как в этом случае аэродинамические коэффициенты профиля не зависят от скорости полета, а зависят только от угла атаки.
Видно, что даже на верхней поверхности профиля, где скорость обтекания сравнительно со скоростью полета значительно возрастает, поток остается плавным.
Влияние скорости на характеристики профиля незначительно также при числах М от 0,3 до 0,7, хотя уже н наблюдаются проявления сжимаемости воздуха в том, что коэффициенты.
Когда число М достигает значения около 0,7, то на профиле (обычно сначала на верхней поверхности) появляется участок, где скорость становится сверхзвуковой, а затем резко, скачком, переходит в дозвуковую, что сопровождается ростом давления плотности воздуха. В таких случаях говорят, что на профиль «сел» скачок уплотнения.
При дальнейшем увеличении скорости скачок на верхней части профиля постепенно перемещается к задней кромке. Одновременно с этим появляется скачок и на
нижней поверхности профиля, который также перемещается к задней кромке.
Образование скачков сопровождается значительным срывом обтекания, что, естественно, приводит к уменьшению подъемной силы и увеличению сопротивления профиля.
Образование скоростного срыва обтекания на нем виден пограничный слой профиля и скачок уплотнения. Скачок уплотнения доходит только до поверхности пограничного слоя. Ниже он не распространяется, так как в пограничном слое скорость меньше скорости звука, а условием образования скачка является наличие сверхзвуковой скорости.
За скачком скорость падает, а давление растет, поэтому в пограничном слое происходит перетекание частиц воздуха по направлению стрелки. Скапливаясь, частички воздуха как бы прорывают стенку пограничной струйки, в результате чего образуется срыв.
Сопротивление профиля, появившееся в результате проявления сжимаемости воздуха, носит название волнового сопротивления. Наибольшая часть потерь мощности несущего винта падает на волновые потерн — волновое сопротивление.
Сопротивление профиля при срыве в 13—14 раз превышает сопротивление при плавном обтекании профиля. Изменение подъемной силы и изменение положения центра давления приводит к изменению моментов, создаваемых профилем. У одних профилей появляется тенденция к пикированию, у других — к кабрированию, что резко отрицательно сказывается на устойчивости и управляемости вертолета.
Чем больше суммарная скорость обтекания профиля, тем больше число М и, следовательно, тем больше волновые потери. Это наглядно видно из диаграммы распределения потерь мощности винта вдоль лопасти винта, показанной.
Чем ближе профиль к концу лопасти, тем большую долю составляют волновые потери.
Таким образом, срыв обтекания при достижении критических скоростей у наступающей лопасти является вторым обстоятельством, ограничивающим полет вертолета с большими скоростями.
Поэтому у каждого вертолета есть предельные значения скорости полета и чисел оборотов винта (двигателя), которые определяются продувками в аэродинамической трубе и летными испытаниями.
Максимальная скорость горизонтального полета вертолета достигается тогда, когда потребная для полета мощность становится равной располагаемой мощности.
Если на вертолете установлен поршневой двигатель, то его располагаемая мощность с увеличением скорости полета не увеличивается, оставаясь примерно постоянной.
Однако потребная мощность с ростом скорости полета изменяется, так как изменяется сопротивление вертолета (фюзеляжа и других частей).
Потребная мощность расходуется на преодоление индуктивного, профильного и вредного сопротивлений.
Сначала, с ростом скорости, потребная мощность уменьшается, так как на создание одной и той же тяги с увеличением скорости полета требуется меньшая мощность. Потребная мощность уменьшается пропорционально увеличению скорости полета. При дальнейшем увеличении скорости сопротивление возрастает пропорционально квадрату скорости.
Та скорость, при которой потребная мощность становится равной располагаемой мощности, является максимальной скоростью горизонтального полета. Дальнейшее увеличение скорости возможно только за счет снижения вертолета.